
|
|
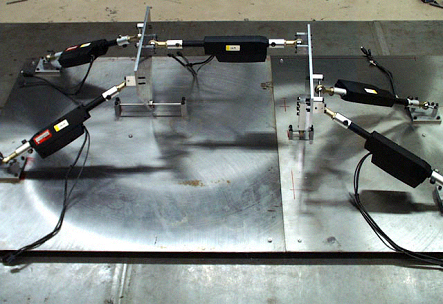
| 試作した12自由度13アクチュエータ平面網構造ロボット | 試作した5自由度空間網構造ロボット |
|
(H8)網構造ロボットの総合と運動制御
|
運動の自由度よりアクチュエータ数の多い過アクチュエータ機構では,
運動の干渉を生じるアクチュエータを精密に強調制御する必要がありますが,
パワーの小さな多数のアクチュエータで大出力を得るという可能性があります.
そのような過アクチュエータ機構の例として,
直動アクチュエータとリンクを回転対偶あるいは球対偶を介して相互に接続して得られる大規模複ループ機構である網構造ロボットを提案しています.
これまでに,連鎖の最小単位であるモジュールを総合して,それらを相互に接続して大規模構造を得る総合法を提案し,
さらに,個々のモジュールの低い精度の位置決めを繰り返しながら高精度の出力運動を得る逆運動学解析手法を提案し,
それに基づく精密位置決め制御を成功しました.
現在さらに,外形形状変化や発生力を最適化する運動制御の研究を行っています.
|