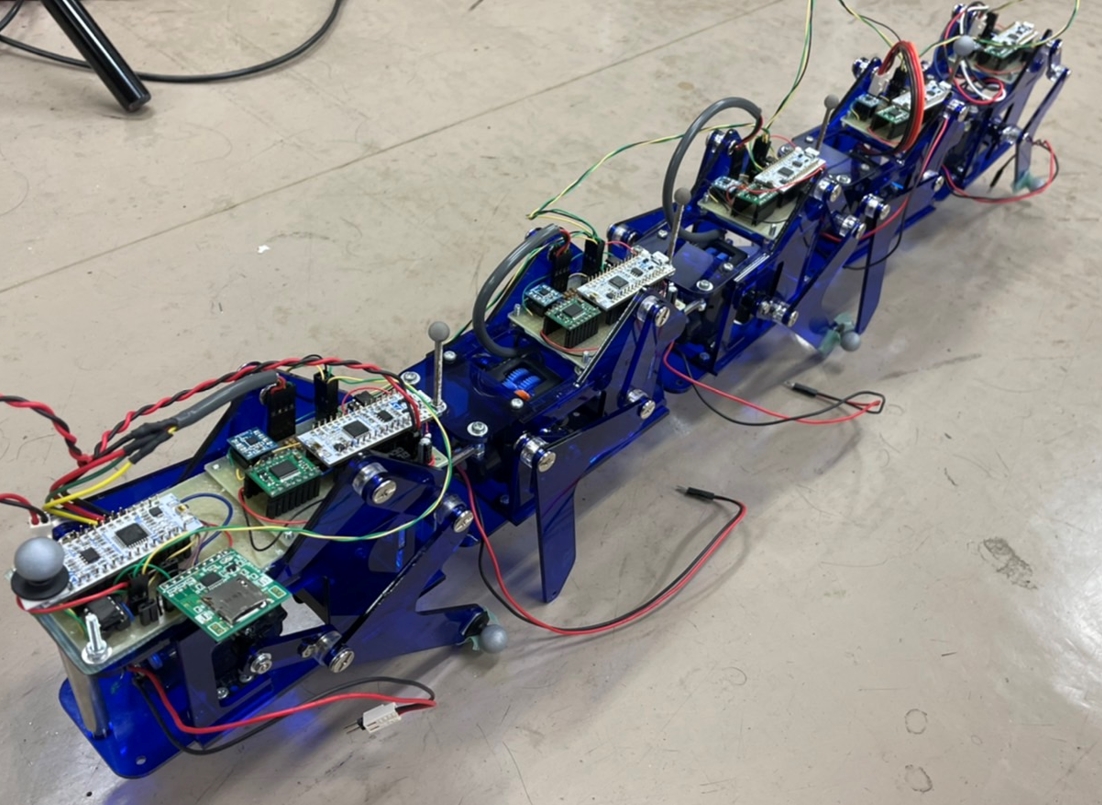
(H3)ムカデロボットの歩行制御
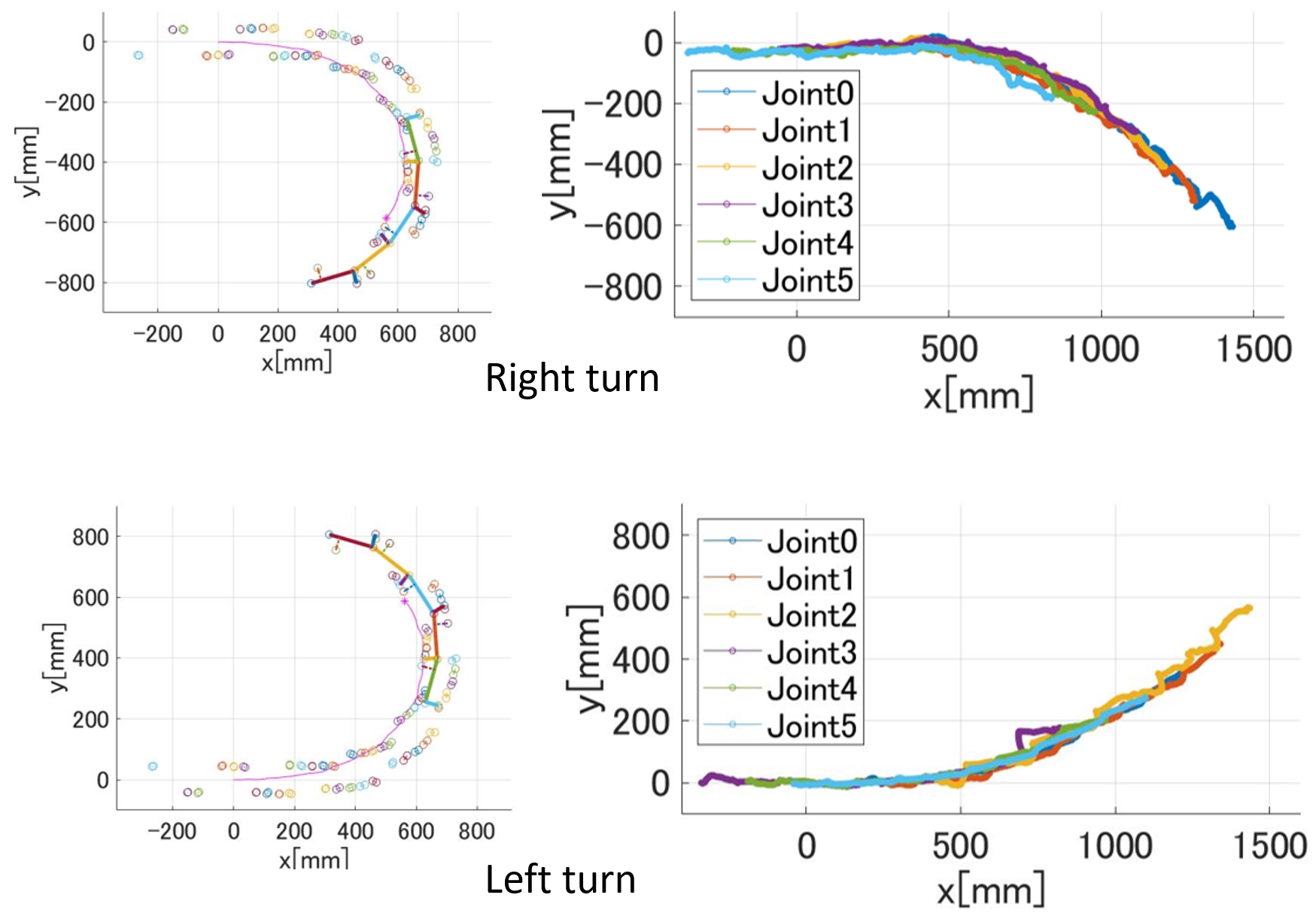
不整地適応性の高いムカデ形多脚移動ロボットを少ないアクチュエータで実現するために,平面4節リンク機構からなる1自由度2脚の脚機構ユニットを鉛直軸回りの受動回転対偶で接続したロボットを提案する. 直進歩行だけではなく,旋回用のアクチュエータなしに旋回歩行を実現するために,ユニット間の位相を調整するのみで旋回を行う制御手法を開発した.
ムカデ型多脚補講ロボット
旋回制御実験結果
トップへ
ひとつ前へ戻る