|
|
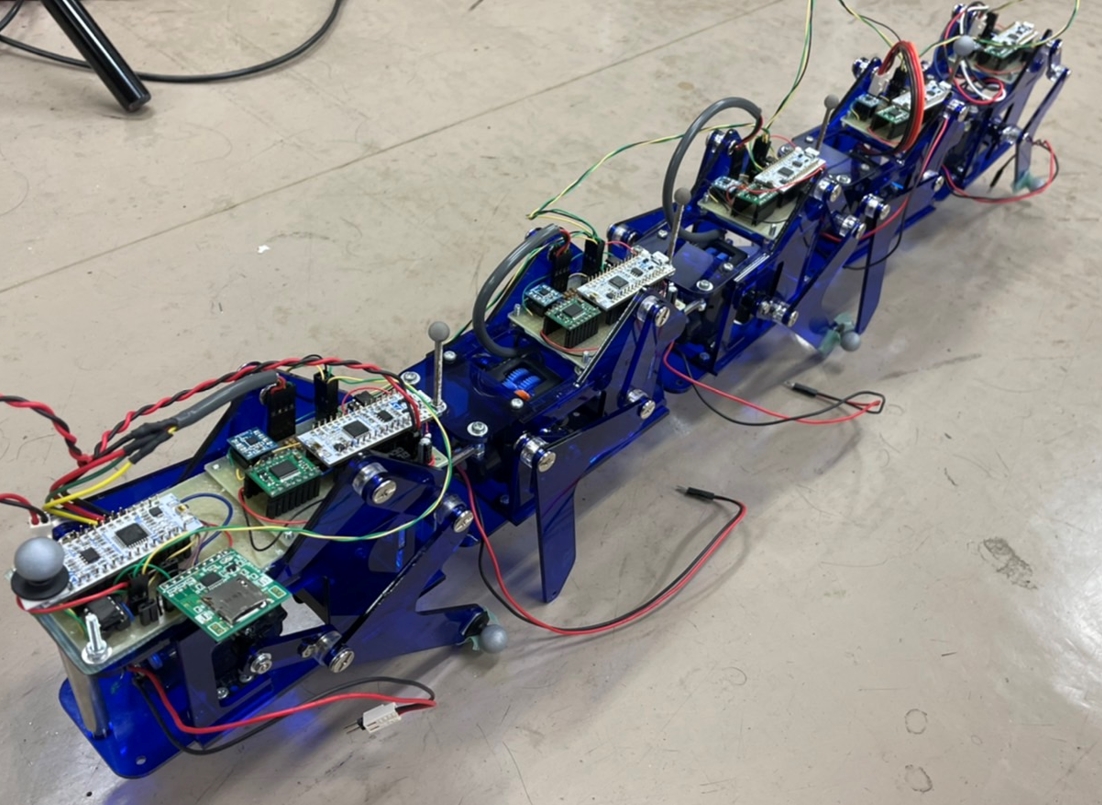
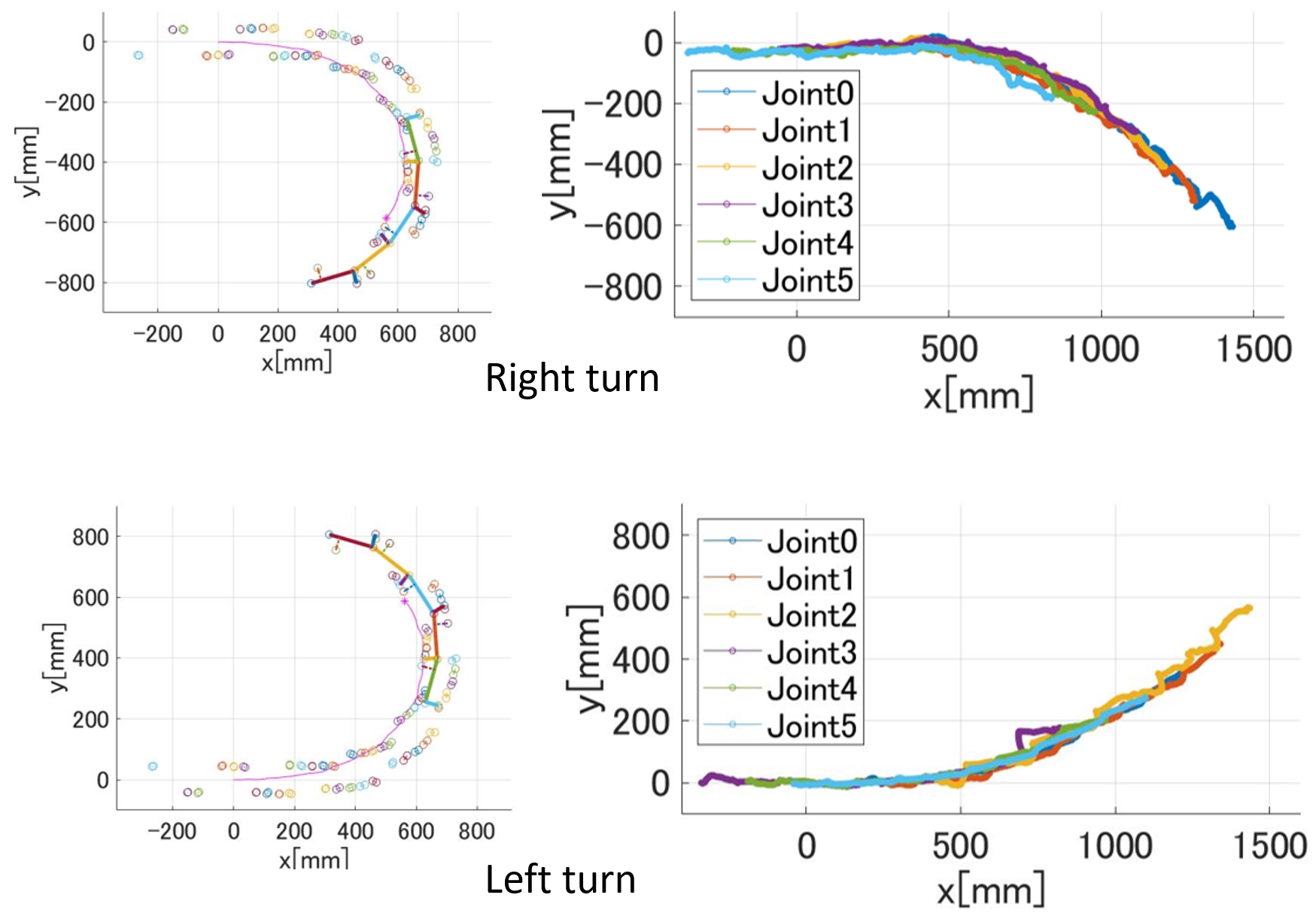
| Centipede walking robot | Result of turning walk experiment |
|
(H3)Walking Motion Control of a Centipede Walking Robot
|
Aming to develop available centipede walking robot, a novel robott composed of many leg mechanism units of two planar 4-bar linkage connected with passive
revolute pairs is proposed. The straight walk is quite easy. The novel contrl method to realize turing walk not by adding extra actuators but controling
phase difference between units is developed. A prototype can achieve the desired turnig walk.
|