※この研究は,福井県工業技術センター 近藤幸治氏との協同研究です.
|

|
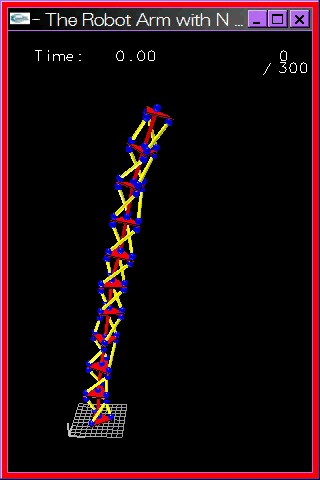
| 10ユニット機構の順運動学解析 | 3ユニット試作機のCP制御実験 |
|
(H7)低自由度ユニットを連結した超多自由度ロボットの運動制御
|
|
2〜4程度の低自由度を持つユニットを数多く連結して,超多自由度ロボットを得ることができます.
このような機構はパラレル/シリアルのハイブリッド機構で出力運動の制御は困難になると予想されます.
各ユニット間の相対運動から,最適な出力運動を得るための逆運動学解析を行って,柔軟・複雑な運動を実現します.
これまでに,3直動アクチュエータをもつユニットを直列連結した機構について順運動学解析ならびに逆運動学解析を可能にし,先端の出力節のCP制御を実現しました. ※この研究は,福井県工業技術センター 近藤幸治氏との協同研究です.
|