|
|
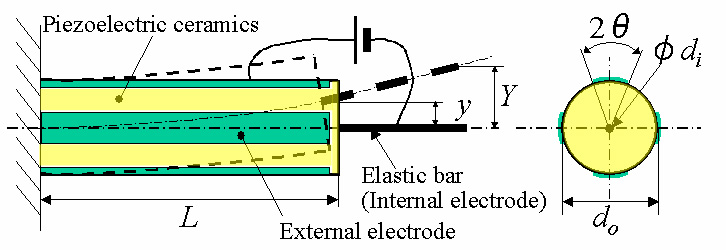
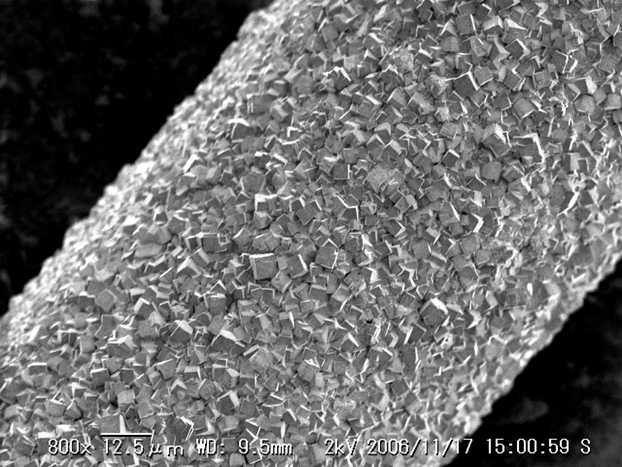
| 圧電パイプモルフアクチュエータ | 100ミクロン径チタン線上のPZT圧電セラミクス薄膜 |
|
(PH1)マイクロ繊毛アクチュエータ群の研究
|
実用的なマイクロ移動ロボット,マイクロ搬送機を開発するために圧電パイプモルフアクチュエータを多数基板上に林立させたマイクロ繊毛アクチュエータ群の製作法・制御法について研究しています.
静電植毛法による内部電極群の形成,水熱合成法によるPZT圧電セラミクス薄膜の形成,選択的蒸着による外部電極の形成からなる製造プロセスを提案し,アクチュエータの試作に成功しています.
|