|
|
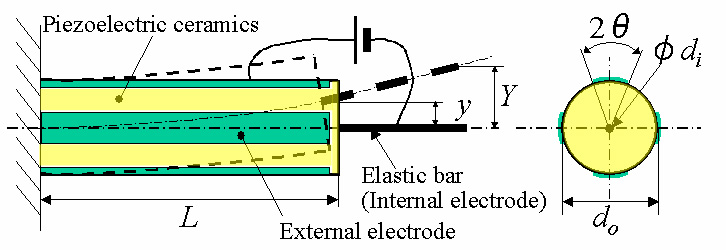
| Piezoelectoric Pipemorph Actiator | PZT Piezoelectric Thin Film on Titanium Wire with 100 microns in Diameter |
|
(PH1)Development of Micro Cilium Actuators in Groupe
|
In order to develope novel micro mobile robots or micro conveyer, micro cilium actuators in groupe which were composed of piezoelectric pipemorph arranged on a base plate was proposed.
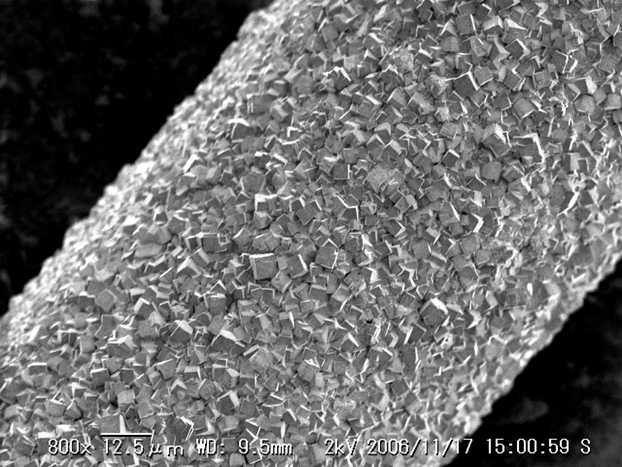
By applying the electrostatic flocking, the hydrothermal method and the selective fabrication of externalelectrode, a prptotype of the actuator was fabricated and was examined.
|