
|
|
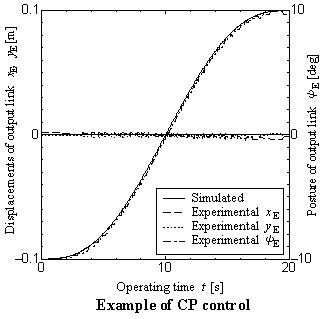
| 弾性要素を有する5自由度8アクチュエータ平面網構造ロボット | 弾性網構造ロボットのCP制御実験結果 |
|
(PF1)弾性要素を有する過アクチュエータ機構の運動制御
|
自由度より多くのアクチュエータをもつ過アクチュエータ機構のアクチュエータ間の干渉の問題を解消して機構の運動を可能にするために,弾性要素を付与して干渉を緩和することを提案しています.
リニアモータとリンクを相互に接続した過アクチュエータ網構造ロボットについて,閉回路方程式と力の釣り合い方程式を同時に解く運動学解析の一般手法を導出して,出力点の正確な位置制御を可能にしました.
さらに,冗長自由度を活用して,剛性を最適化しつつ位置制御を行うことを試みています.
|