
|
|
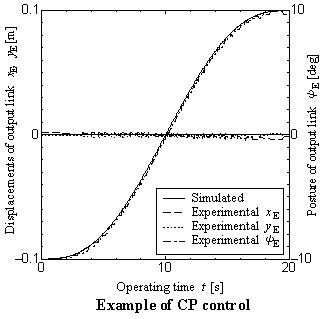
| Prototype of Planar Elastic Network-structure Robot with 5 DOF and 8 Actuators | Result of CP-control |
|
(PF1)Motion Control of Overactuator Mechanisms with Elastic Elements
|
In oder to avoid the interference between actuators in overactuator mechanism, we have proposed to add elastic elements in the mechanisms to relax the interference. A new direct kinematics taking account of both of kinematic relation and force balance was established. An optimum control scheme to utilize redundant DOF was also proposed and CP-control while keeping high stiffness of the output link could be achieved.
|