|
|
|
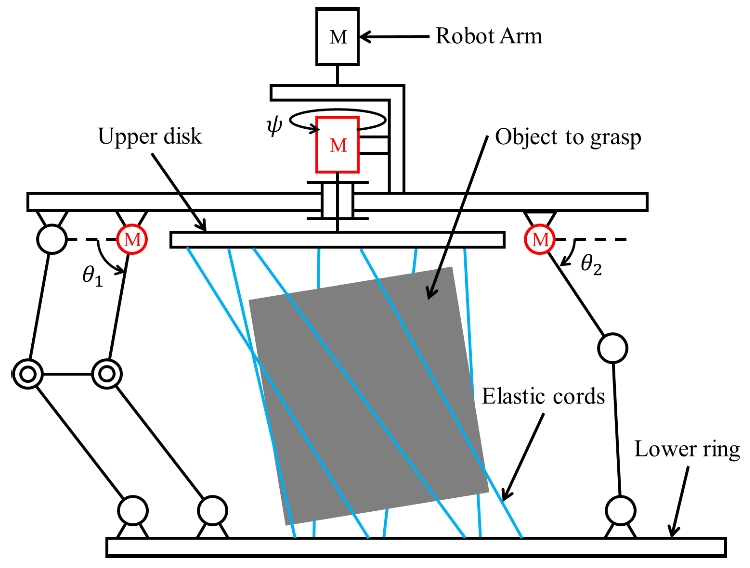
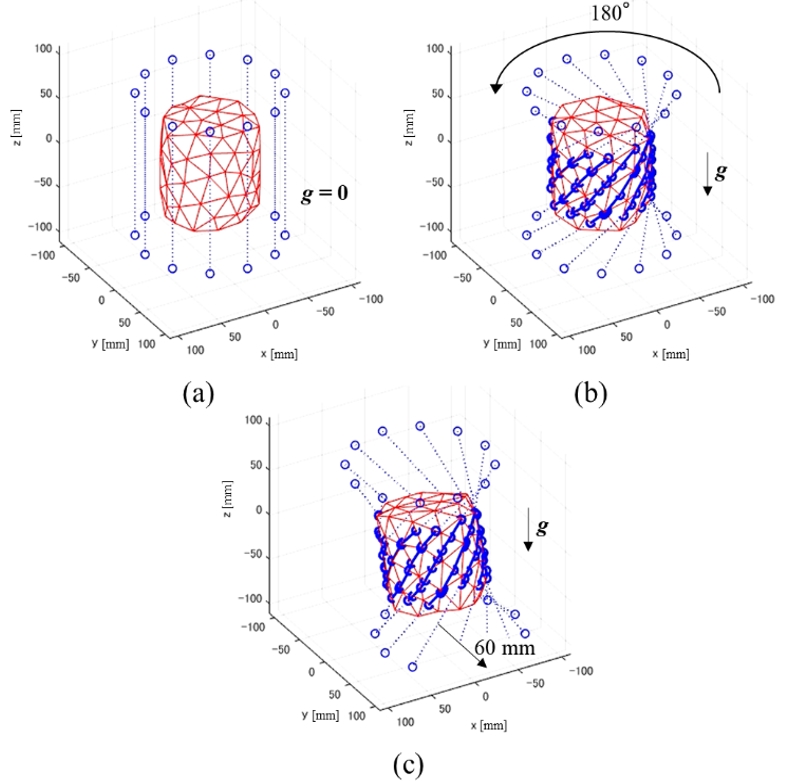
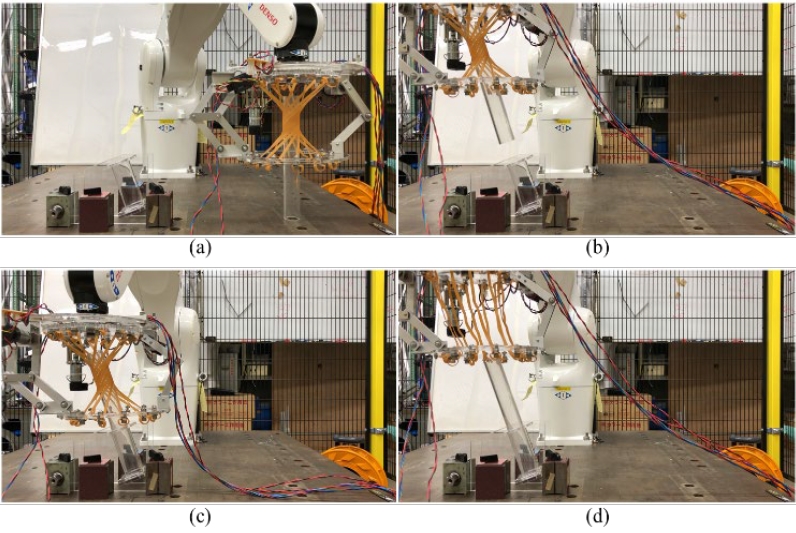
| 機構図 | 把持・操作シミュレーション | 斜面ペグインホール実験 |
|
(F1)弾性索の集合からなる柔軟把持・操作機構
|
脆弱・不定形の物体を単純な制御で柔軟に把持・操作できる新しいロボットハンドを開発する.
二つの円環の間に複数の弾性索を平行に取り付け,把持物を弾性索の中に入れて,2円環に相対回転を与えると弾性索が把持物にからみついて把持し,
さらに2円環に相対並進変位を与えると把持物の姿勢を制御できる.この弾性索のからみつきにともなう把持物の変位・角変位を与えることができる.
試作ハンドを産業用ロボットに通り付け,円柱形把持物を斜面上の穴に挿入するペグインホール動作をリモートセンターコンプライアンス機能を持たせて実現した.
|