A novel robot hand which can flexibly grasp and manipulate faigile or nonuniform object is proposed.
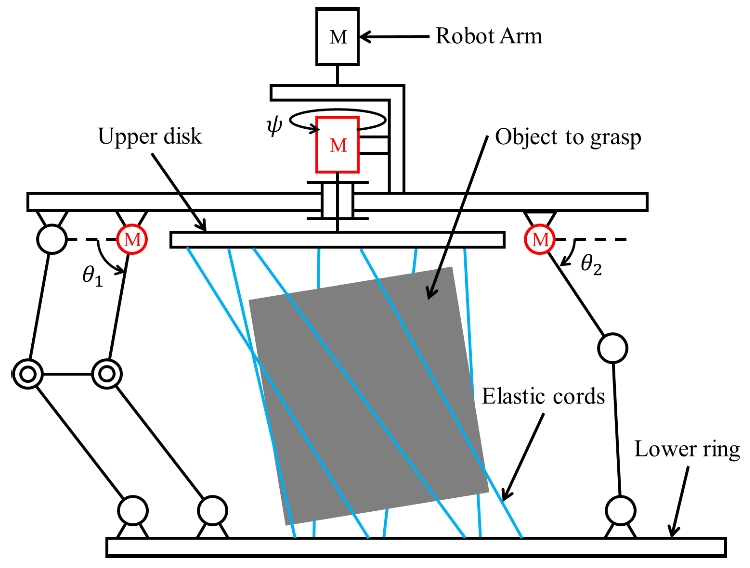
The proposed had is composed of two circular rings parallelly conncted with many elastic cords. By putting an object in elastic cords and relatively rotating
the rings, elasitic cords wrap around the object and the hand can softly grasp the object. And ny giving relative traslation between the rings, the posture of grasped object
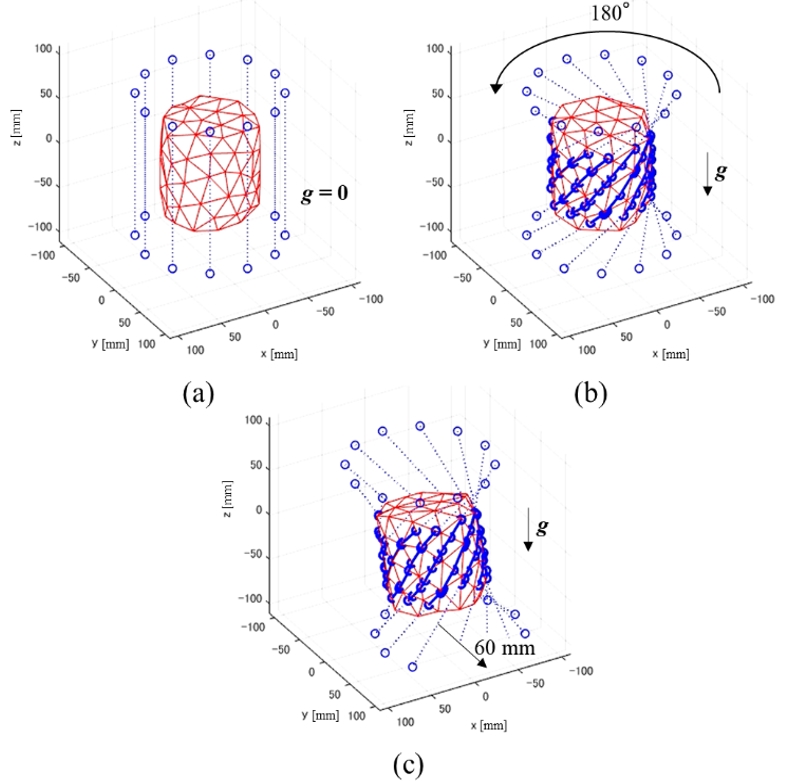
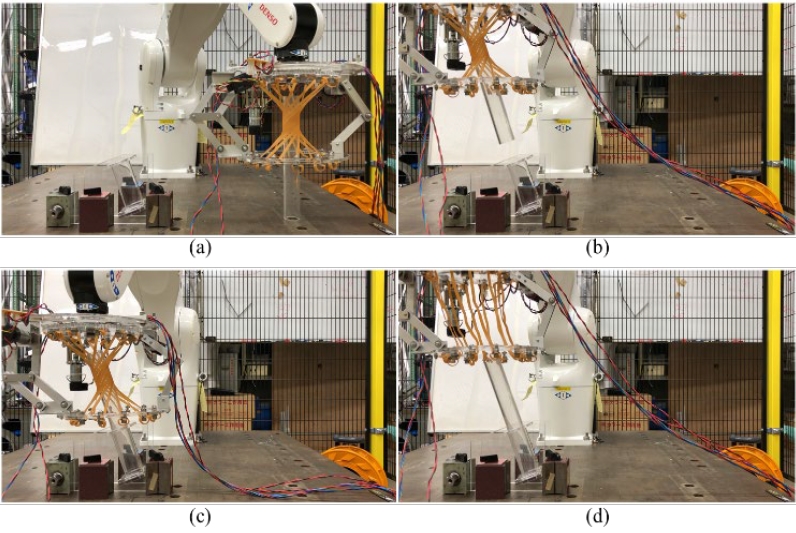
can be controlled. Motion of the object and grasping force can be theoretically calculated with a polyhedron model. A protpype attached at the tip of serial robot arm can grasp
a cylinder and achieve peg-in-hole task on a slant plane with remote center compliance function.
|