(H6)弾性リンクの位置と剛性の制御
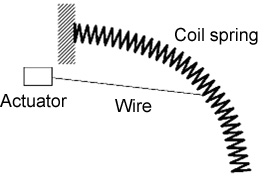
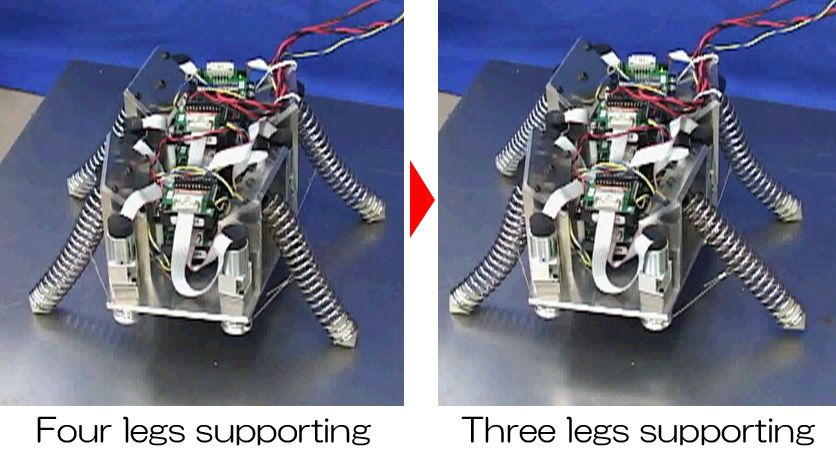
環境との柔軟なインタラクションをしつつ複雑な運動を可能とするために,マニピュレータの構造本体を弾性体としてその位置と剛性の同時制御を行う手法を確立します. 具体的にコイルばねを2本のワイヤで駆動することにより先端の位置決めとコンプライアンスの制御を試み,さらにそれらを弾性脚とした4足歩行ロボットを開発しています.
コイルばねのワイヤ駆動
弾性脚をもつ4足歩行ロボット
トップへ
ひとつ前へ戻る