|
|
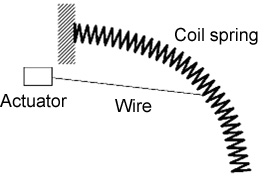
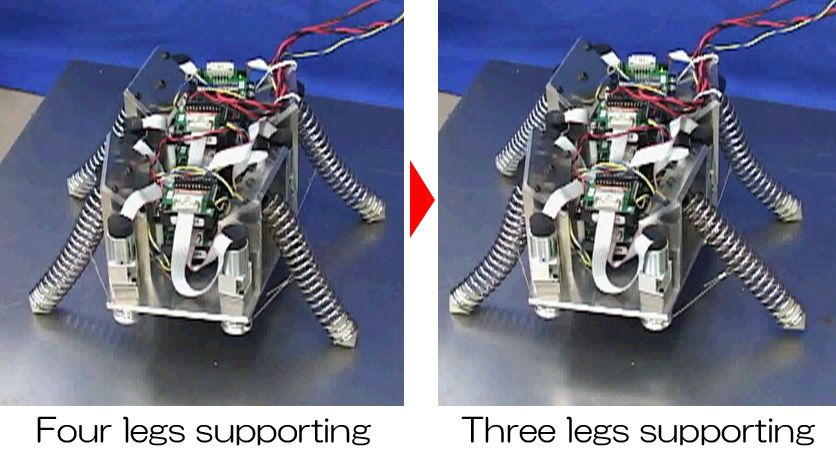
| Wire Driven Coil Spring | A Walking Robot with Four Wire Driven Elastic Legs |
|
(H6)Control of Position and Compliance of Elastic Links
|
In oder to develop a new elastic manipulator which can softly interacts to environments, a coil spring was driven by two wires and was controlled its tip position and stiffness.
The wire driven elastic link was also applied to a legged walking robot.
|