(F6)空間閉ループ弾性リンク機構の振動解析
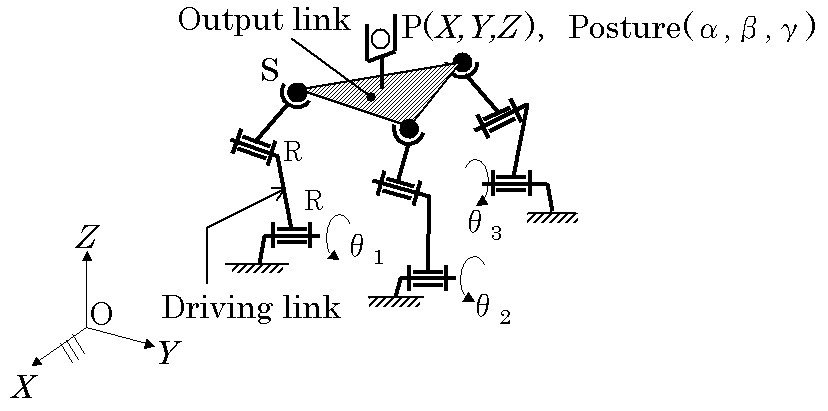
弾性リンクで構成される空間閉ループリンク機構の過渡振動解析手法の確立を目標とします.対象として,まずS−R−R連鎖3本をもつ3自由度空間閉ループマニピュレータの運動解析を達成するとともに,これまでに実績のある空間直列マニピュレータの振動解析法を拡張した解析を目指しています.
3自由度空間パラレルマニピュレータ
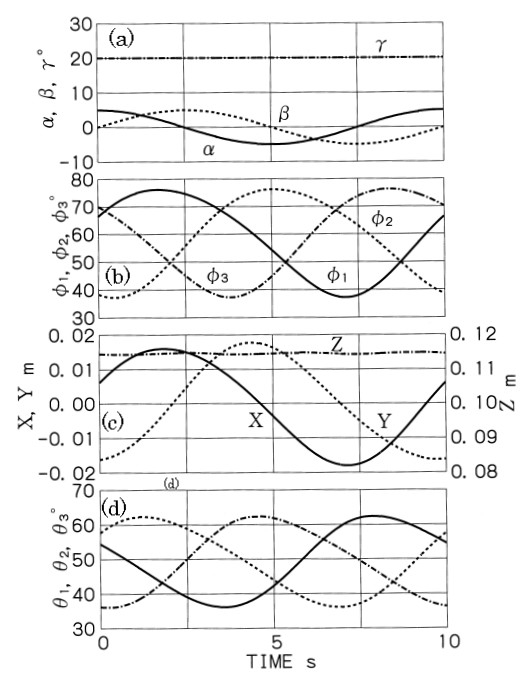
逆運動学解析結果の例
トップへ
ひとつ前へ戻る