|
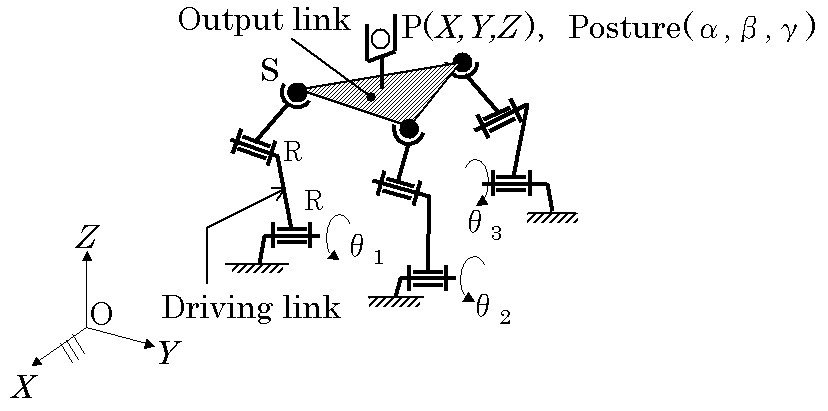
| A spatial parallel manipulaor with 3 DOF |
|
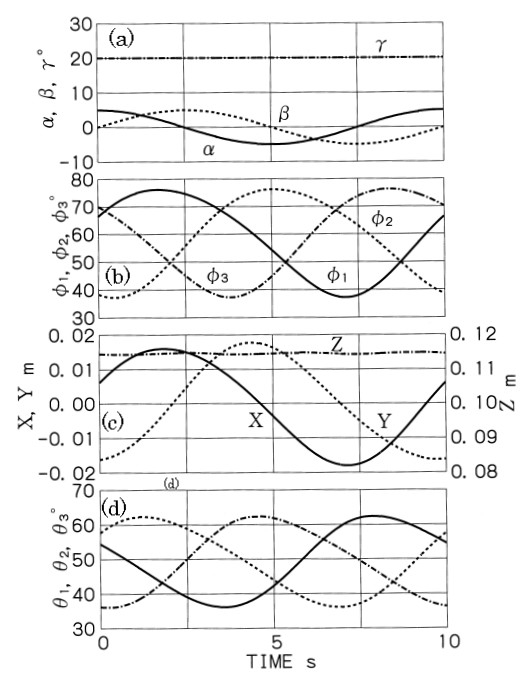
| An example of inverse kinematics |
|
(F6)Vibration Analysis of Spatial Closed-loop Mechanisms with Elastic Links
|
In order to establish a new method to analyze transient vibration of a spatial closed-loop mechanism with elastic links, the previous method for spatial serial manipulator has been extended.For an example, a spatial parallel manipulatorwith 3 DOF was analyzed and controlled.
|