|
|
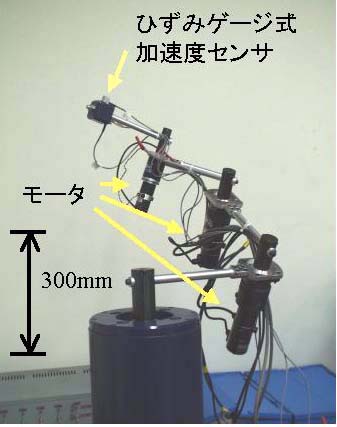
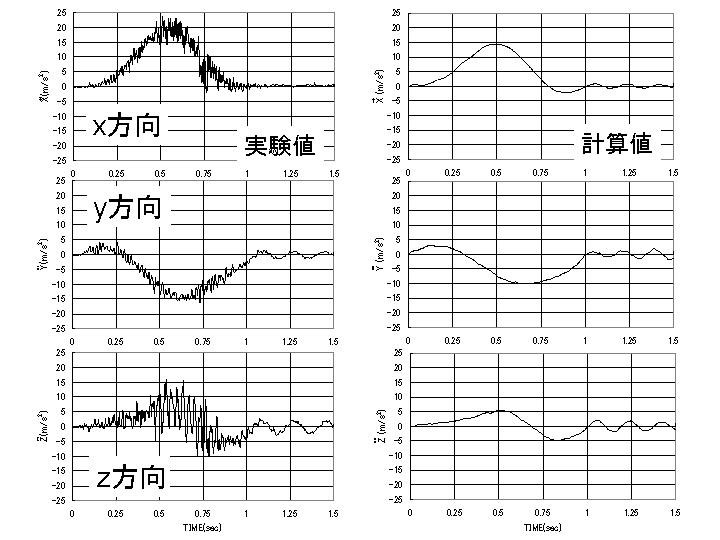
| 試作弾性マニピュレータ | 振動解析例 |
|
(PF2)多自由度弾性直列マニピュレータの振動解析
|
宇宙用マニピュレータなど極限まで軽量化されたロボットマニピュレータは大きな弾性振動を生じます.
その制振制御に用いるために高速高精度に弾性振動を計算するシミュレーションツールを開発しています.
リンクをL字形はりにモデル化し,時々刻々,マニピュレータがL字形はりが直列に接続したラーメン構造物とみなして近似解析を行う手法を提案しています.
リンクがオフセット配置された空間4リンクマニピュレータの解析と実験検証を行いました.
|