|
|
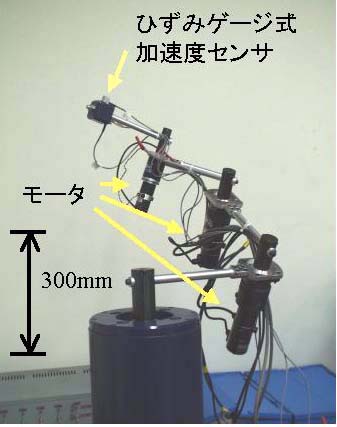
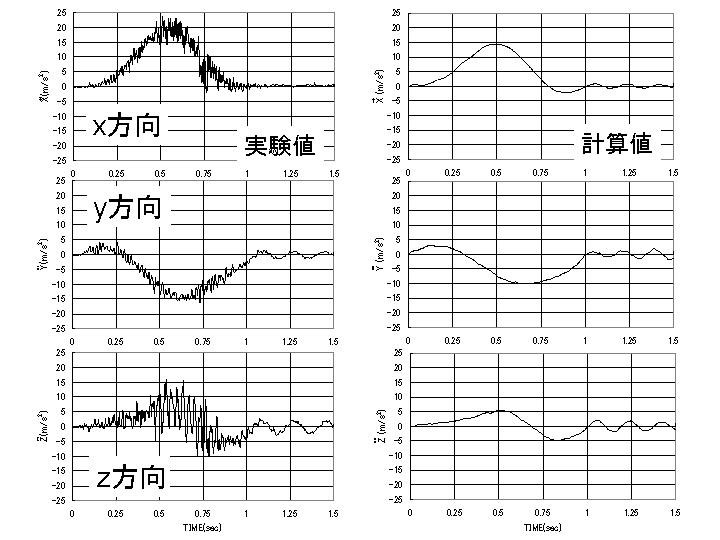
| Prototype of Spatial Elastic Serial Manipulator | One Example of Calculated and Measured Vibratory Acceleration |
|
(PF2)Vibration Analysis of Spatial Serial Elastic Manipulator
|
In order to establish control system to surpress elastic vibration of serial manipulators with light weight, a new effective simulation tool should be developed. A spatial serial manipulator was modelled as instanteneous Rhamen structure obtained by serially connecting L-shaped Euler's bar and elastic vibratory equations were then derived. For an example, a 4R-manipulator was analyzed and experimentally examined.
|