|
|
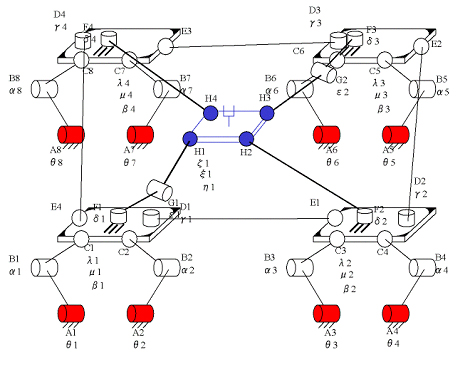
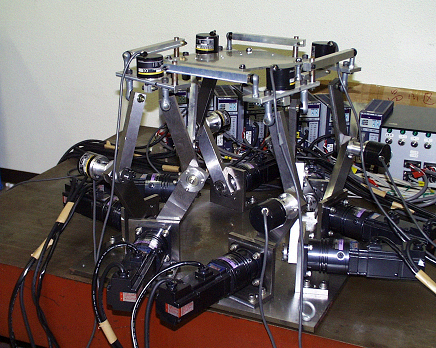
| 8自由度複ループ空間マニピュレータ機構図 | 試作8自由度複ループ空間マニピュレータ |
|
(PH3)冗長複ループ空間マニピュレータの総合と運動制御
|
高速,高剛性,高精度が期待される複ループ空間マニピュレータ(パラレルマニピュレータ)に,
さらに複雑・柔軟な運動を可能にするために,冗長自由度を付与することを試みています.
これまでに,アクチュエータをすべて静止節に配置し,かつ対称性を有する平面,空間複ループマニピュレータの数の総合を行うとともに,
8自由度空間複ループマニピュレータを試作し,その運動学解析を行って,駆動制御を可能にしました.
現在,冗長自由度を活用した最適運動制御手法を求めているところです.
|