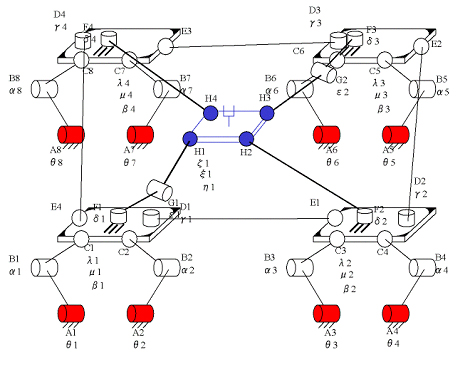
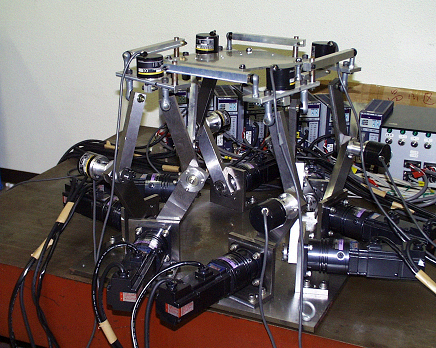
Spatial closed-loop manipulator with redundancy which can not only drive at high speed with high power and high accuracy but also generate flexible motions has been proposed. Number syntheses of planar and spatial closed-loop mechanism with redundancy and strctural symmetricity were carried out. For an example, a prototype of a spatial closed-loop manipulator with 8 DOF in which all rotary actuators are located on the frame was kinematically analized. We have tried to establish the control method to utilize redundant DOF while avoiding singular configuration.
|