※この研究は管清工業(株)との協同研究です.

|
|
| 「ねじ原理」による管内移動 | 段差管通過可能な管内移動ロボット |
|
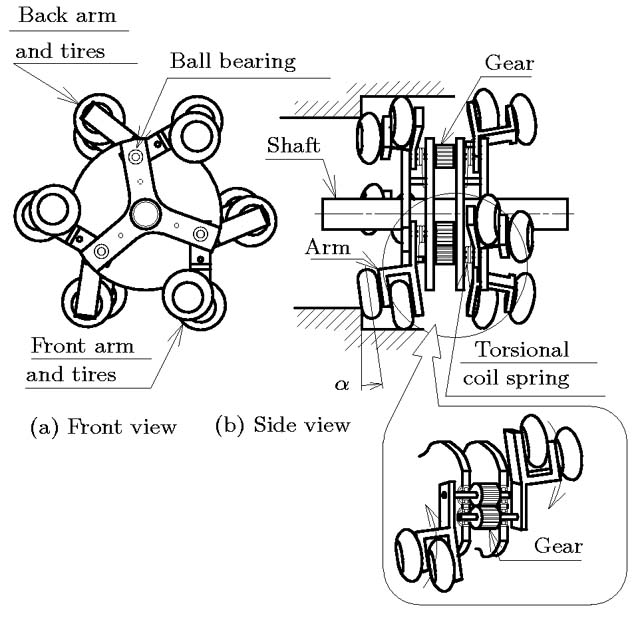
(PH11)「ねじ原理」による管内移動ロボットの開発
|
|
都市の重要なライフラインの維持管理のために,管内を移動し,検査・補修が可能な管内移動作業ロボットを開発しています.管軸に対して斜めに車軸を設定したタイヤをロボット本体に取り付け,フレキシブルワイヤによってロボットを自転させることによりロボット本体の前進・後退を可能にする「ねじ原理」に基づく管内移動ロボットを提案しました.直径25mmの細管,屈曲管,段差管の通過を達成しています. ※この研究は管清工業(株)との協同研究です.
|