|
|
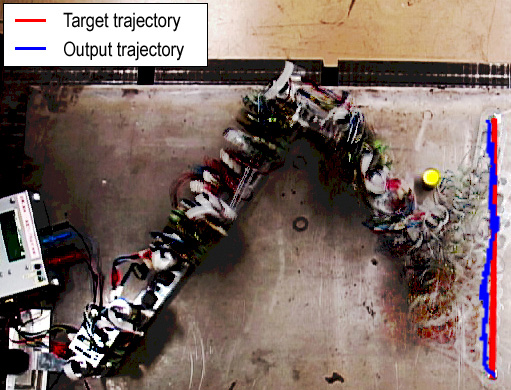
| 誤差履歴線形和学習制御のシミュレーション | 10R直列マニピュレータによる実験検証 |
|
(PH2)超多自由度ロボットの学習制御
|
極めて多数の冗長自由度をもつロボットの目標軌道を生成するために,多数のアクチュエータへの最適な入力を学習的に獲得する手法について研究しています.
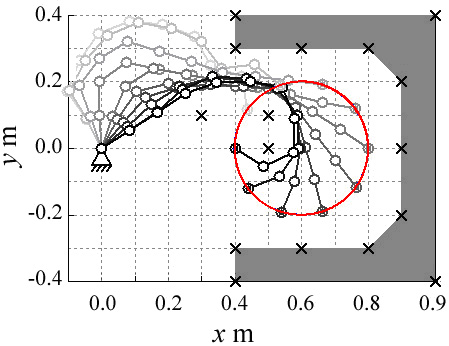
学習過程間および運動時刻間の出力運動誤差べクトルの線形和の逆運動学解析によりアクチュエータ入力を学習的に求めていく「誤差履歴線形和学習制御」を冗長シリアル/パラレル機構に適用しました.
さらに,冗長性を活用する副目的運動の設定ならびに後退学習法の提案を行い,10R平面直列マニピュレータに林立する障害物を回避しつつ出力点の位置制御を行わせることに成功しています.
|