In order to generate suitable trajectory of a hyper redundant robot, we have tried to apply the learning control scheme based on linear combination of error history that actuator inputs are calculated with Jacobian matrix and output error vectors to the control.
New schemes to set subtasks for utilizing redundant DOF and to obtain initial configuration with the backward learning were proposed and implemented to a planar serial manipulator with redundancy.
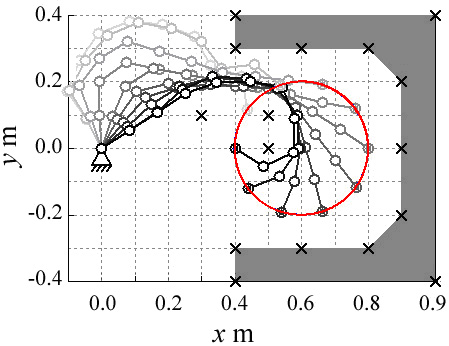
A planar 10R serial manipulator robot could obtain a suitable trajectory while avoiding several obstacles.
|