(H4)ワイヤ駆動劣駆動機構の運動制御
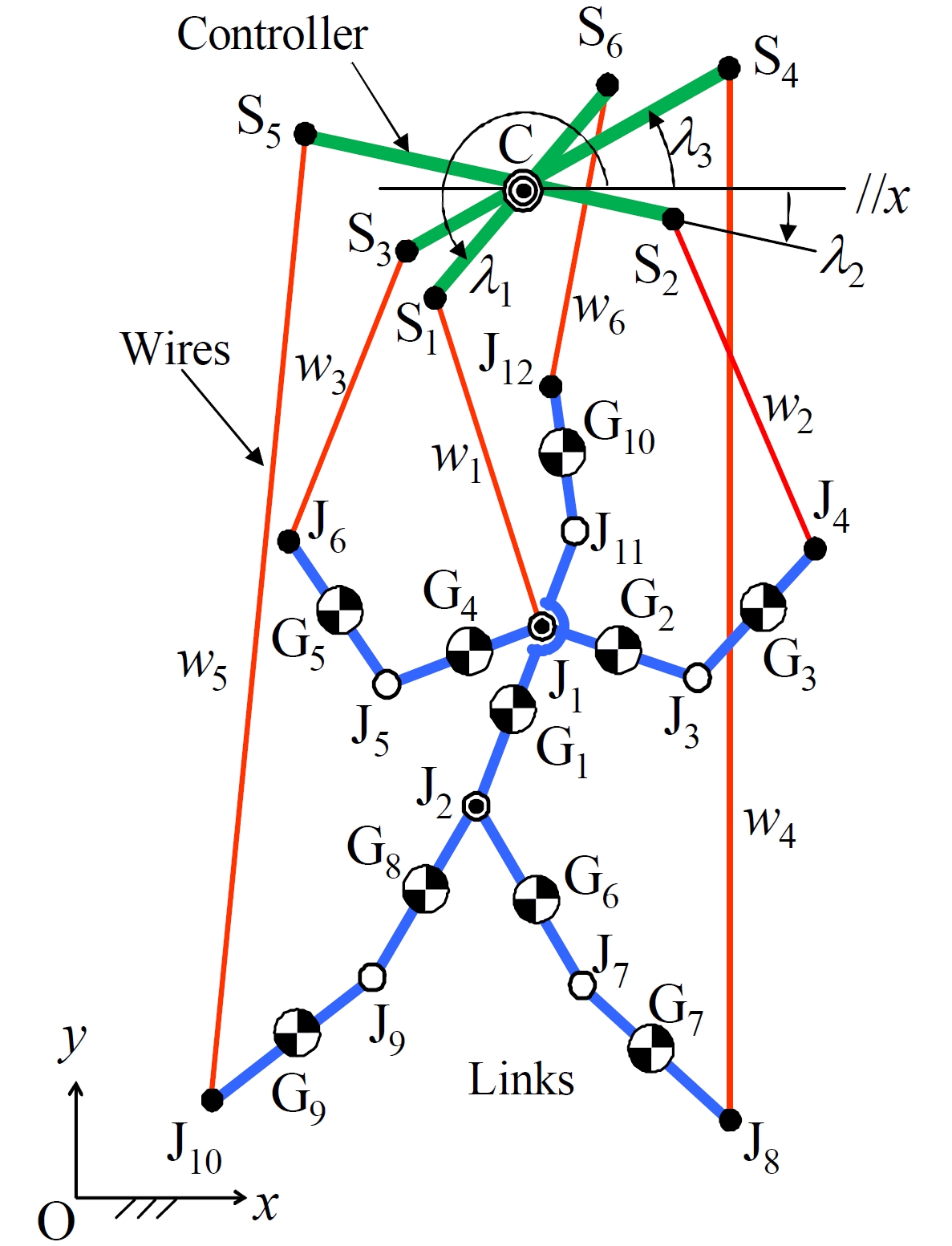
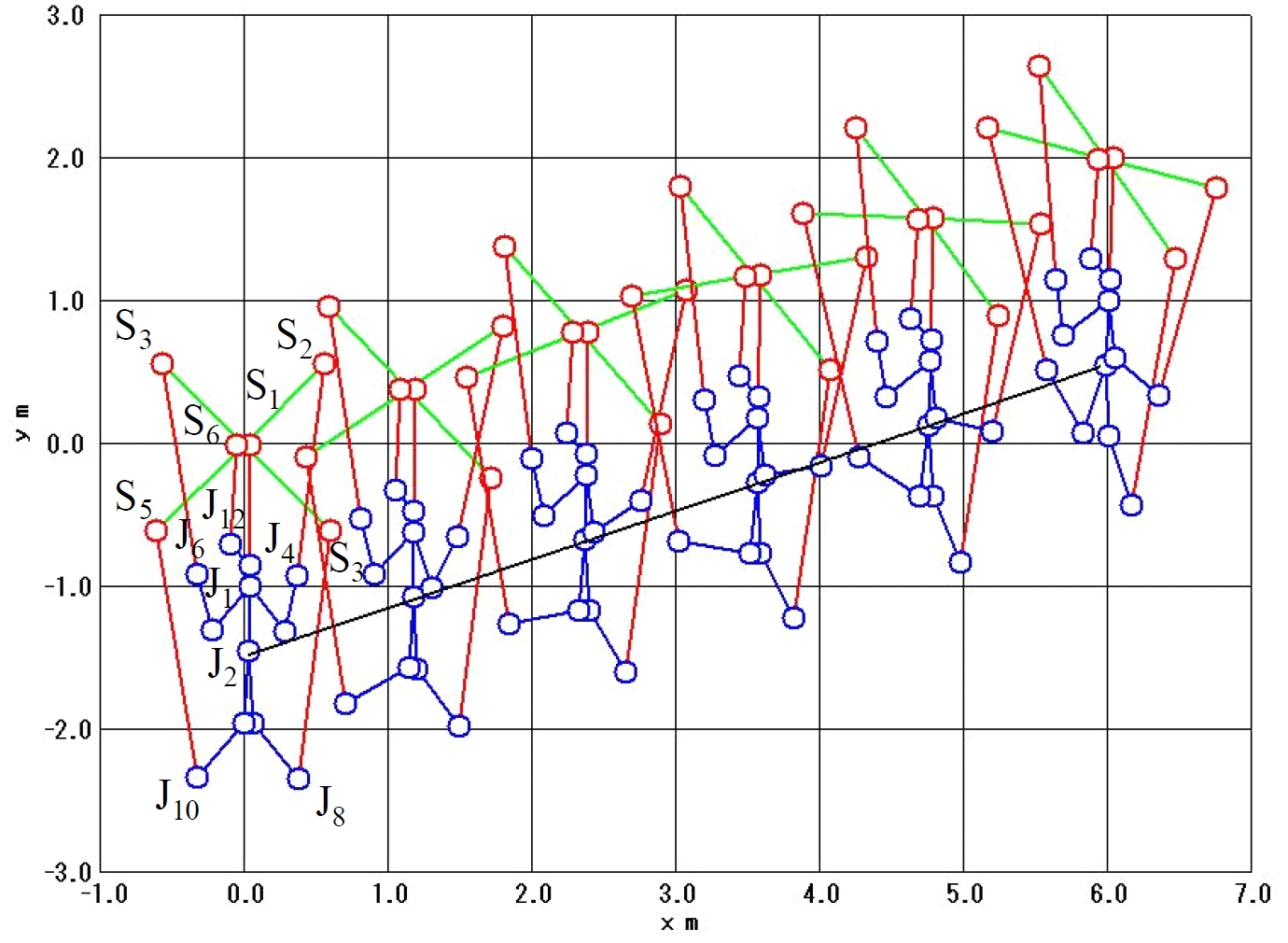
操り人形は人形に相当するリンク連鎖を複数のワイヤを介してコントローラと呼ばれるリンク連鎖の運動で動作させる劣駆動機構であり,人形は重力による位置エネルギーが最小となる姿勢で静止する. 操り人形の順運動力学解析,達成可能な姿勢となるように修正しつつコントローラの運動を求める逆運動力学解析を明らかにした.例として,ヒト形操り人形の姿勢変更動作を実現した.
ヒト形マリオネット
逆運動力学解析例
トップへ
ひとつ前へ戻る