|
|
| Human -shape marionette | An example of inverse kinetostatic analysis |
|
(H4)Motion Control of Wire-driven Underactuated Link Mechanisms
|
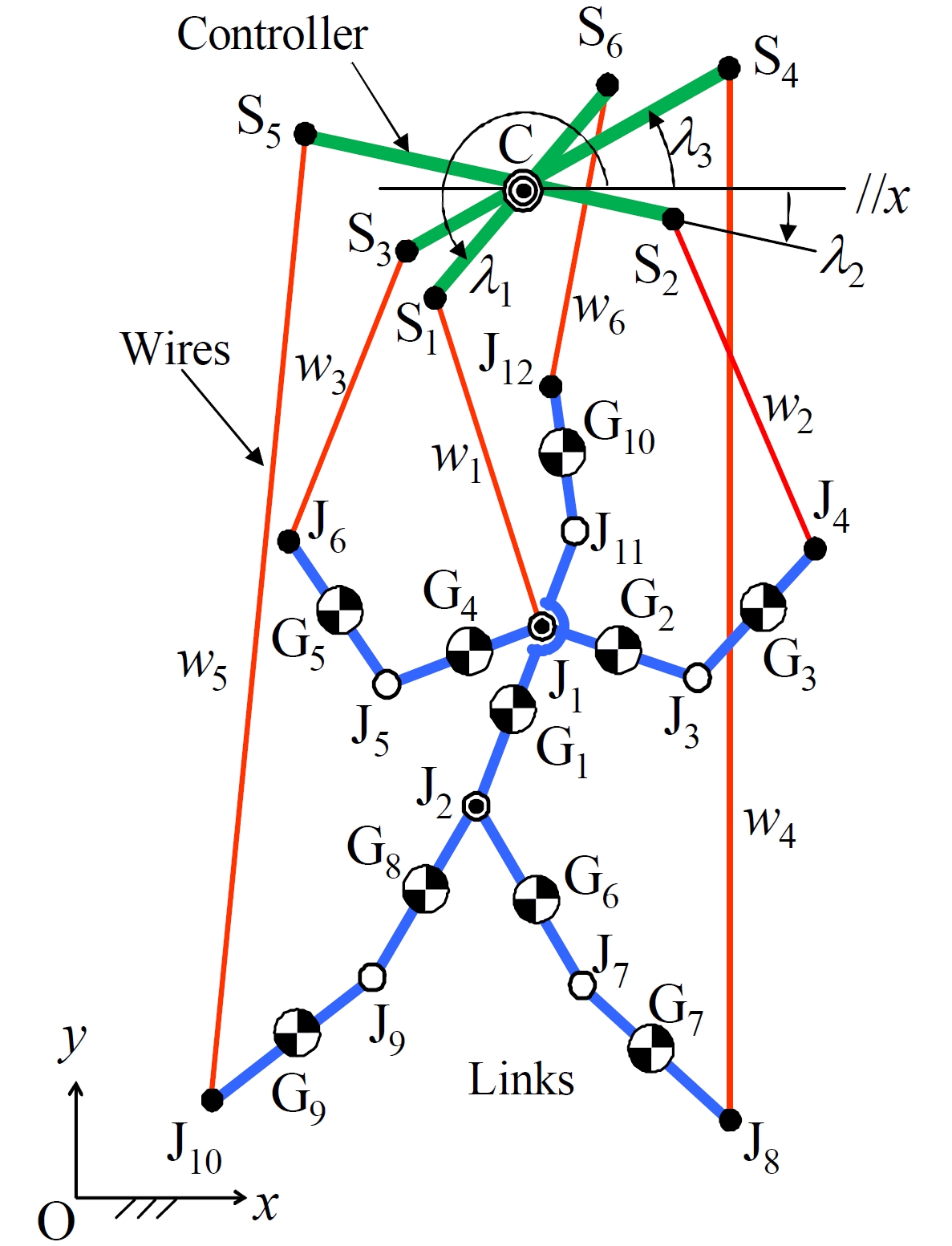
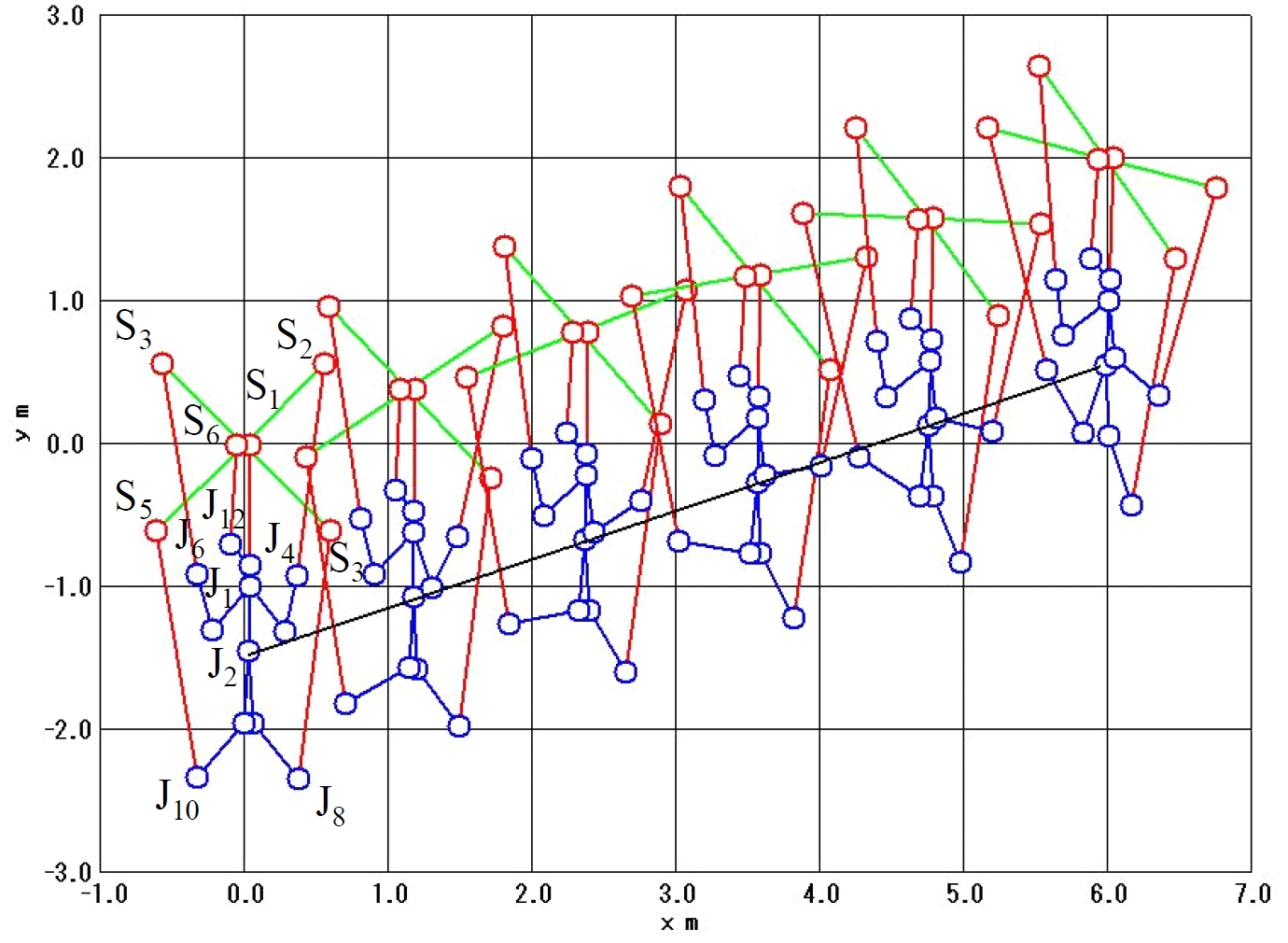
A marionette is a wire-driven underactuated mechanism. The posture of a puppet as an output link chains should be determined as the posture
with the minimum potential energy due to gravutational force. The forward kinetostatic analysis to find the optimum posure of puppet and
the inverse kinetostatics analysis to determine the optimum motion of control link chain while modifying the posture of the puppet are established.
|