※本研究は管清工業株式会社との協同研究です.
|
|
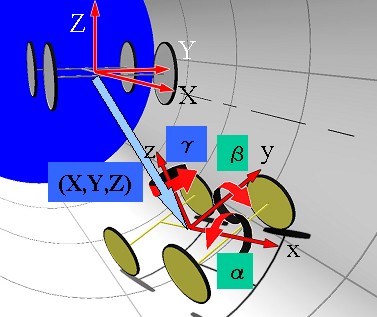
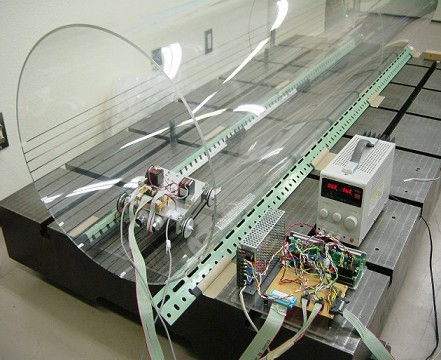
| 管内における位置と姿勢 | 試作ロボットと実験管路 |
|
(PH5)管内移動作業ロボットの姿勢安定化走行制御
|
|
地中埋設管路網の保守管理に活躍する車輪型管内移動作業ロボットは蛇行により管壁を登り転倒に至るという問題があります.本研究では,姿勢角センサによるロボットの姿勢角情報と管路の敷設情報のみから管内におけるロボットの位置を検出して,ロボットが安定な姿勢を保ちつつ走行する自律制御系を構築することを目的としています.これまでに,ステアリング機能のない4輪管内ロボットが直管路を走行する場合に,3姿勢角と管壁と車輪の接触条件から管軸垂直方向変位を求め,ロボットが管底を直進走行するよう,車輪の速度差を与えるフィードバック制御系を提案しました. ※本研究は管清工業株式会社との協同研究です.
|