*We have collaborated with Kansei Kogyo Co. Ltd. for this research.
|
|
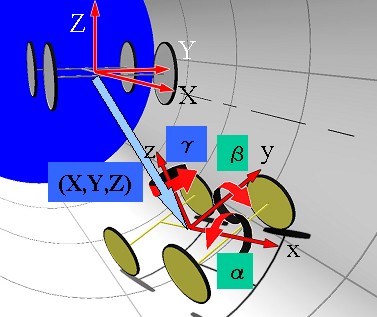
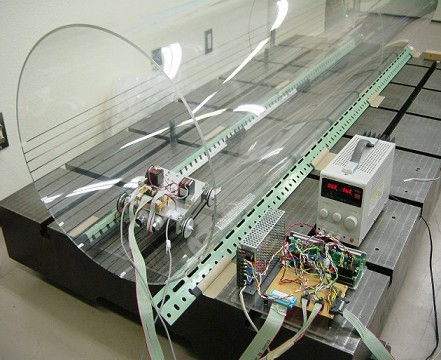
| Position and posture in a round pipe | A prototype and a round pipe for experiments |
|
(PH5)Posture Stabilizing Control of Inpipe Mobile Robot
|
|
A new control scheme to stabilize a posture of a inpipe mobile robot will be established. A non-holonomic mobile robot with four wheels was controlled to run on the bottom of straight round pipe only by detecting three posture angles in the pipe. *We have collaborated with Kansei Kogyo Co. Ltd. for this research.
|