|
|
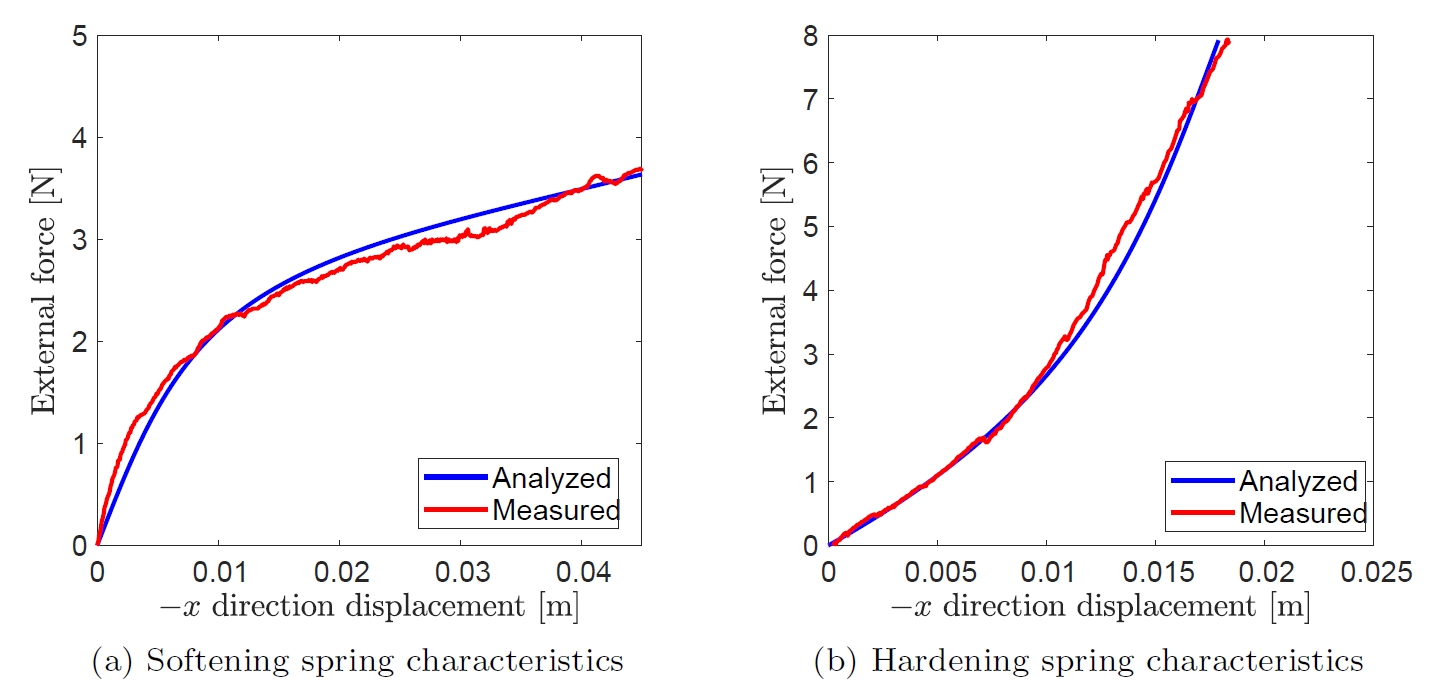
| A planar underactuated mechanism constrained by elastic elements | The obtained nonlinear stiffness |
|
(F4)Nonlinear Stiffness Control with a Underactuated Redundant Link Mechanism Constrained with Elastic Elements
|
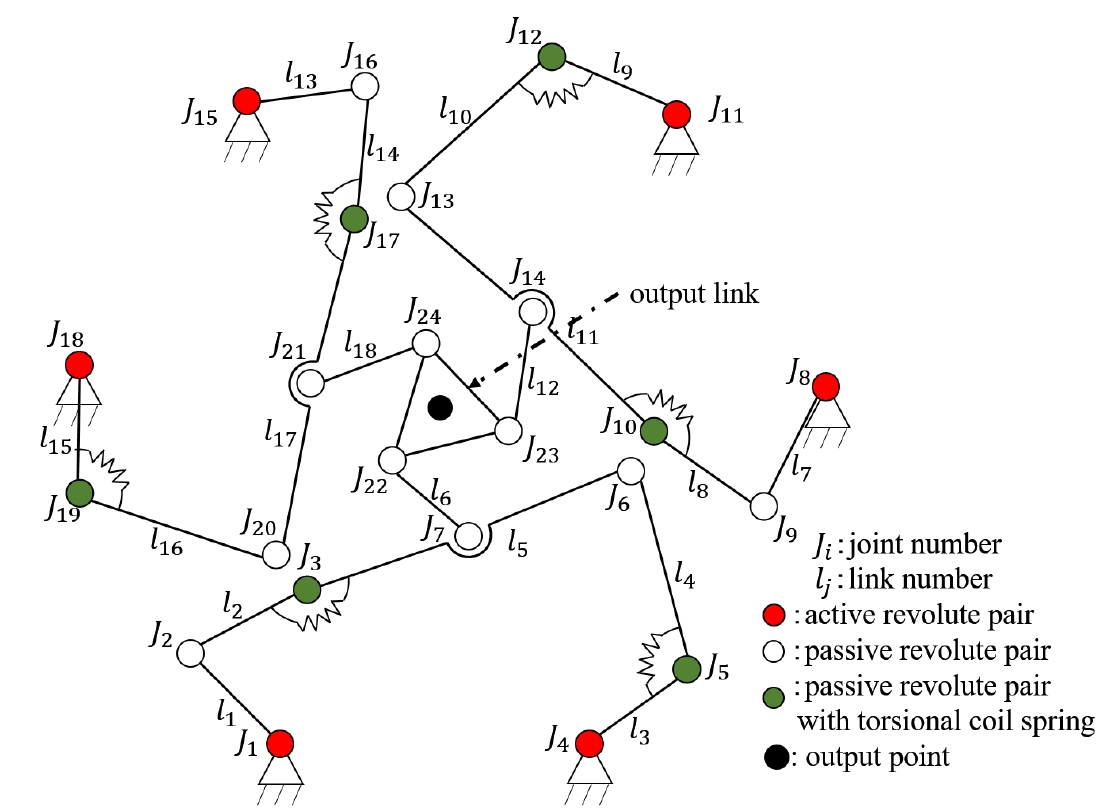
Aiming to control nonlinear stiffness of an output link of a redundant underactuated link mechanism, the configuration of the mechanism can be changed by controling acutators fixed on a frame.
For an example, a planar link mechnaism with 9 DOF and 6 rotary actuators whose passive joints are constrained with torsional springs can generate both of hardening and softening stiffness only by changing configuration of the mechanism while it can genarate the specified output point.
|