※この研究は(株)ハーモニックドライブシステムズとの協同研究です.
|
|
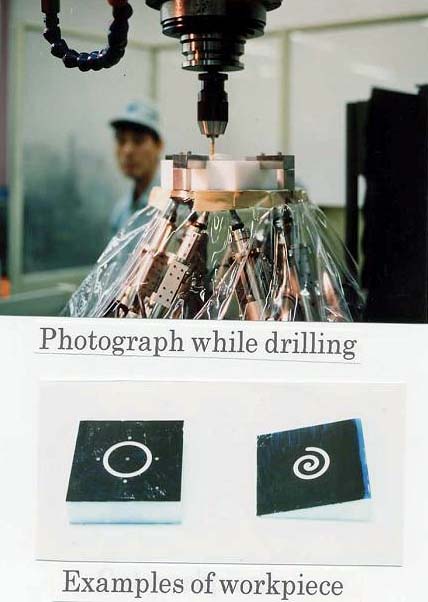
| アクティブワークテーブルによる加工の様子 | 加工例 |
|
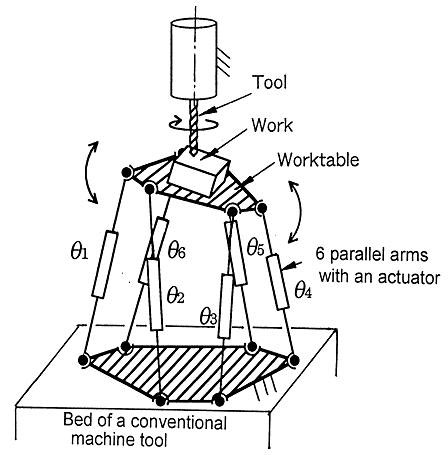
(PH10)パラレルマニピュレータ型アクティブテーブルの開発
|
|
高速,高精度,高剛性,高出力が期待されるパラレルマニピュレータを工作機械へ応用します.スチュワートプラットフォームマニピュレータのテーブル上にワークピースを取り付け,それを固定ツールに押し付けて三次元加工を行わせる,アクティブワークテーブルを開発しました.これを既存のフライス盤などに装着すれば,容易・安価に知能化工作機械を得ることができます.加工実験を行うとともに,機構パラメータ誤差の精密同定法を開発しています. ※この研究は(株)ハーモニックドライブシステムズとの協同研究です.
|