|
|
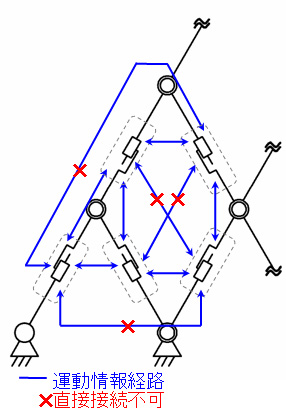
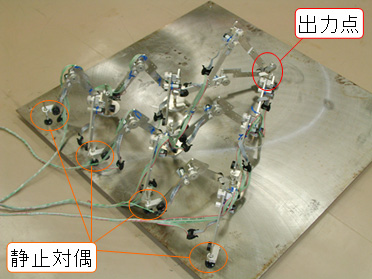
| 運動情報の伝播 | 試作した多自由度過アクチュエータ平面移動ロボット |
|
(PH6)運動情報伝播に基づく多自由度過アクチュエータ機構の運動制御
|
運動の自由度より多くのアクチュエータを有する多自由度過アクチュエータの運動制御を可能にするために,個々のアクチュエータの運動と出力運動の情報を逐次,伝播して,次のアクチュエータ運動を決定してゆき,得られる出力運動を評価しつつ所望の運動を達成する新しい制御手法を提案する.これまでに,多数の直動アクチュエータを多重回転対偶を介して相互に接続して得られる平面過アクチュエータ機構を対象として,繰り返し収束演算に基づく運動制御を可能にしました.
|