|
|
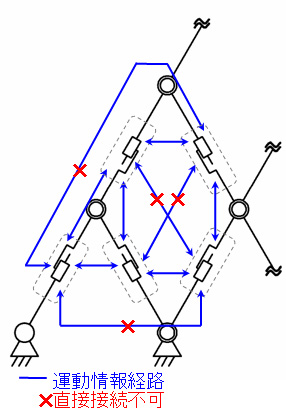
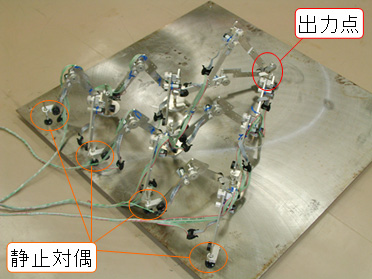
| Propagation of Motion Informations | Prototype of Overactuator Planar Robot with Redundancy |
|
(PH6)Motion Control of Overactuator Mechanisms with Multi-DOF Based on Propagation of Actuator Motions
|
In order to control overactuator mechanisms, we have proposed a new control scheme based on propagation of actuator motions and output motions among actuators. For an example, planar overactuator mechanisms composed of linearactuators connecting by multiple pairs was analyzed and controlled.
|