ロボットに与えられた目標運動を達成する能力と,将来設定され得るあらゆる目標運動の達成能力を同時に最大化する冗長自由度活用戦略に基づき, 「目標運動の達成支援性」と「関節の運動可能性」を定量的に評価し,最適化する関節入力を得る運動制御手法を構築しました.
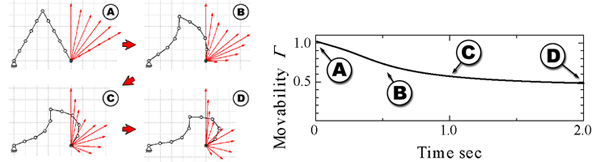
エンドエフェクタの運動可能性最小化制御
|
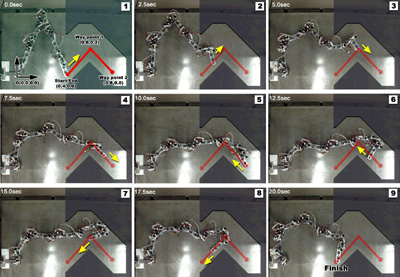
試作平面10R冗長マニピュレータの運動制御実験結果
|
|
(H5)超多自由度ロボットの冗長性制御
|
|
運動空間の自由度より遙かに多くのアクチュエータを有する超多自由度ロボットに, 生物と同様の器用かつ知的な運動を実現させることを目指しています. ロボットに与えられた目標運動を達成する能力と,将来設定され得るあらゆる目標運動の達成能力を同時に最大化する冗長自由度活用戦略に基づき, 「目標運動の達成支援性」と「関節の運動可能性」を定量的に評価し,最適化する関節入力を得る運動制御手法を構築しました.
|