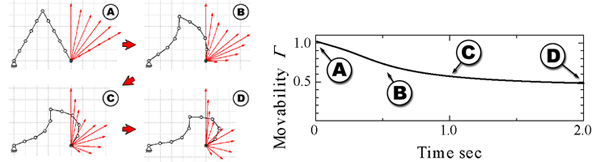
Obtained Configration from the Movability Minimizing Control
|
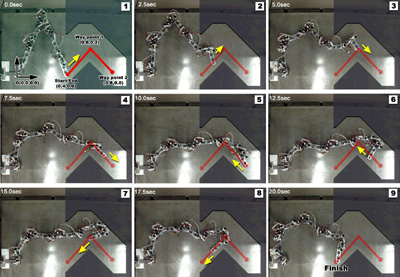
Experimental Validation with a 10R Planar Serial Manipulator
|
|
(H5) Redundancy Utilization of Hyper Redundant Robots
|
In order to achieve dexterous motions of hyper redundant robots like creatures, we have established several methods to utilize redundancy.
Both of the ability to achieve current target tasks and the capability to achieve future target tasks have been evaluated by 'Assistability' and 'Movability' measures.
Based on two redundancy utilization strategies, optimum joint inputs to maximize these abilities were derrived and that scheme was applied to the motion control of hyper redundant robots.
|