|
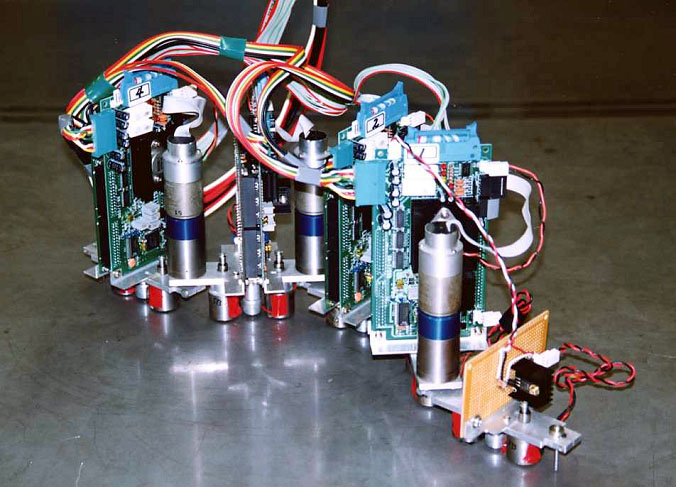
| 反射運動により軌道生成する平面移動ロボット |
|
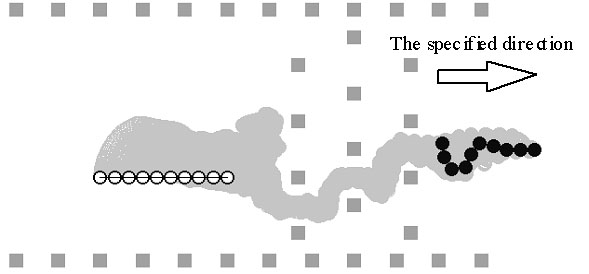
| 林立する障害物をすり抜けるシミュレーション例 |
|
(H9)構造ユニットの反射運動に基づく超多自由度ロボットの運動制御
|
極めて多数の冗長自由度をもつロボットでは,目標軌道を実現するためのすべてのアクチュエータ入力を中枢のコンピュータで一義的に決定することは極めて難しくなります.
そこで,ロボットをユニット構造として,そのユニット一つ一つに小さなコンピュータを搭載し,ユニットが自律分散的に外界からの刺激に対して単純な反射運動を行うのみでロボット全体の軌道を生成する制御手法を提案しました.
直列多リンク機構による平面移動ロボットが障害物のある地形に置かれたときに,ユニットであるリンクの障害物への接近を刺激とし,それに対して反射的に逆向きにリンク退避させるという動作を順次繰り返すのみで,ロボット全体の軌道を生成し,障害物を避けつつ移動を達成します.
|