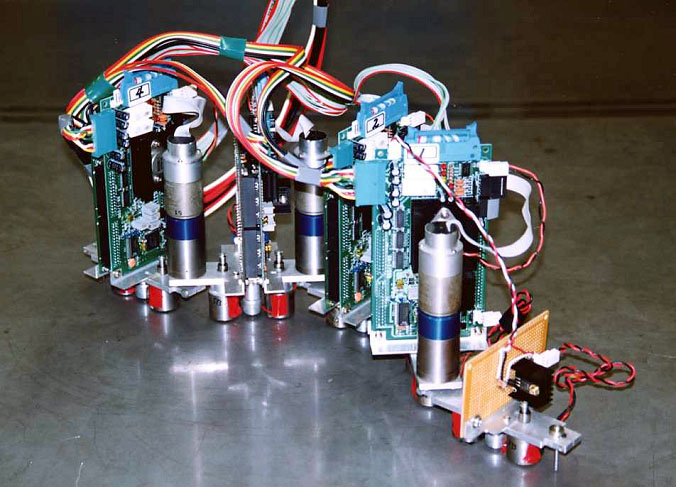
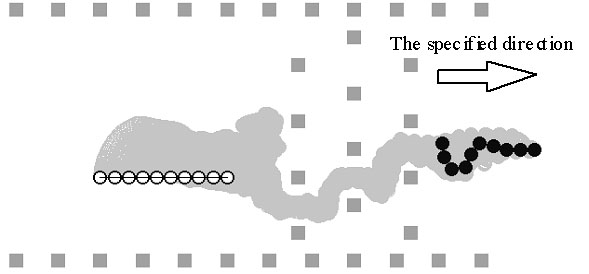
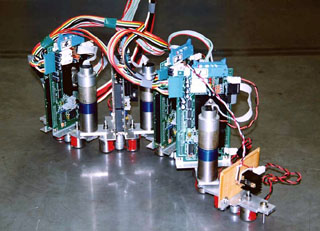
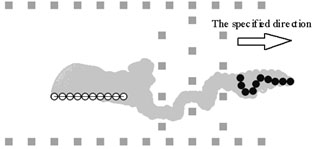
It is difficult to determine all actuator inputs of hyper redundant robot which has hundreds of actuators. We have thus proposed a new control scheme suitable for hyper redundant robot. A robot is composed of many units which have a small computer and a sensor and an actuator. Each unit can detect a stimulus from environment and then do a reflex motion against the stimulus taking no account of motions of other units. Consequently the summation of reflex motions of all units generates trajectory of whole robot. This scheme was aaplied to trajectory generation of planar mobile robot avoiding many obstacles. The approach to obstacles and avoidance from the obstacles are assumed as a stimulus and reflex motion, respectively. The planar linkage robot could escape from a dead-end street composed of obstacles without any instructions for exit. By assuming the specified direction as constant stimulus, the robot can move in the specified direction.
|
re
|
|