※この研究はミノルタ株式会社との協同研究です.
|
|
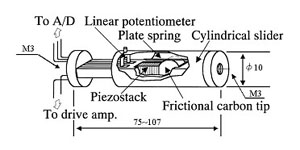
| SIDMマイクロリニアアクチュエータの構造 |
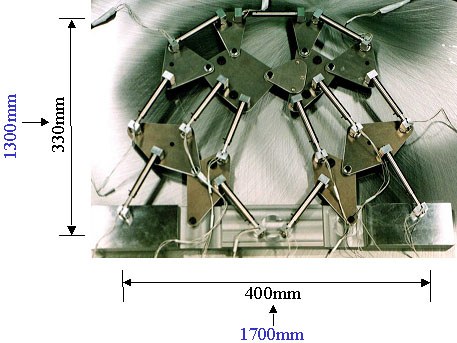
SIDMマイクロリニアアクチュエータを用いた 平面網構造ロボット |
|
(PH8)SIDMマイクロリニアアクチュエータとそれを用いたロボット機構
|
|
小形で高出力のアクチュエータとして,圧電素子の微小振動と往復の慣性力と摩擦力の差を利用して滑らかな直線運動を得る,スムーズインパクト駆動方式(Smooth Impcat Drive Method)の小形リニアアクチュエータをとりあげ,その駆動性能を明らかにするとともに,網構造ロボットへ適用しました. ※この研究はミノルタ株式会社との協同研究です.
|