*We have collaborated with Conica-Minolta Co. Ltd. for this research.
|
|
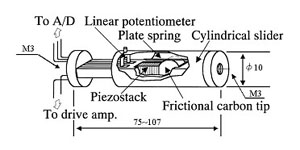
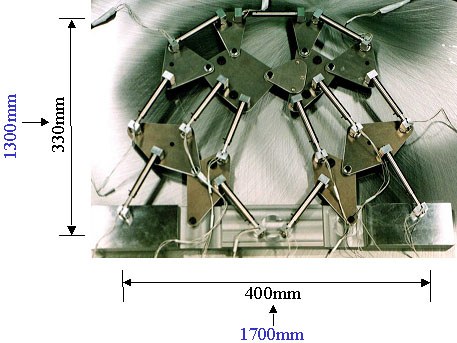
| SIDM Micro-linearactuator | Planar Network-structure Robot with SIDM Micro-linearactuator |
|
(PH8)Robotic Mechanisms with SIDM Micro-linearactuator
|
|
A piezoelectoric micro-linearactuator based on the Smooth Impact Drive Method (SIDM), which was driven by using small vibration due to a piezostack and difference between frictions in moving direction, was developed and the output characteristic of the atuator was experimentally examined. The SIDM micro linearactuators were applied to a small planar network-structure robot for CP-control of the robot. *We have collaborated with Conica-Minolta Co. Ltd. for this research.
|