(F5)出力変位と剛性を制御できるロボット機構
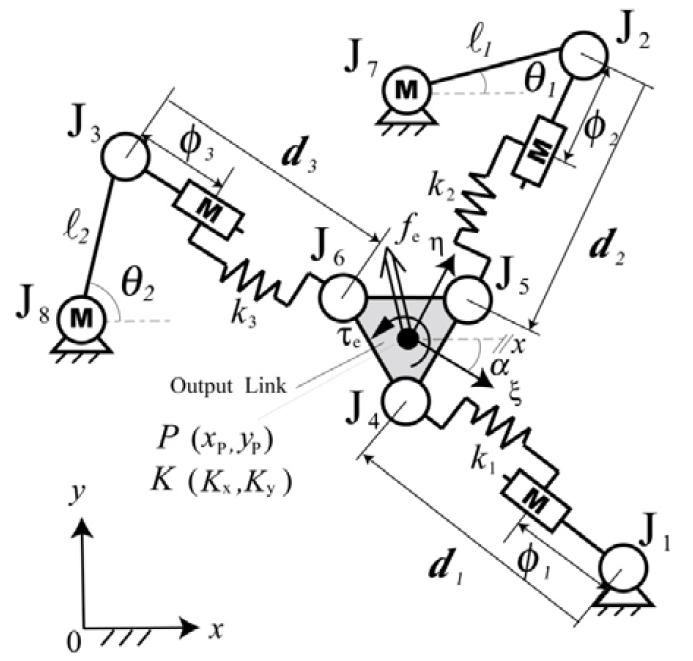
弾性要素を付加した冗長パラレルメカニズムのもつ柔軟性と冗長性を活かして,出力リンクの変位と剛性の同時制御を行います. 例として,3直動モータと2回転モータならびに3つのばねをもつ平面5自由度パラレル機構で出力リンクの直交2方向の変位と剛性を指定することができます.
平面弾性5アクチュエータ機構
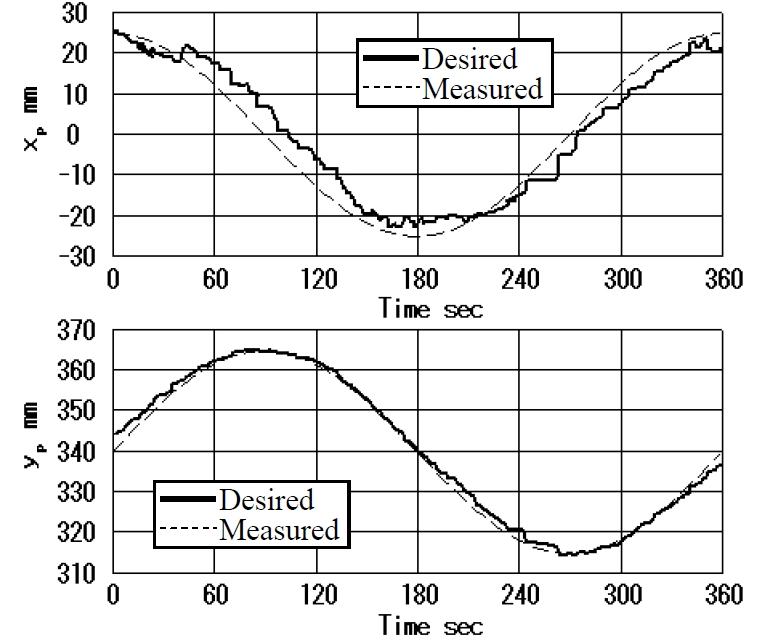
出力変位の例
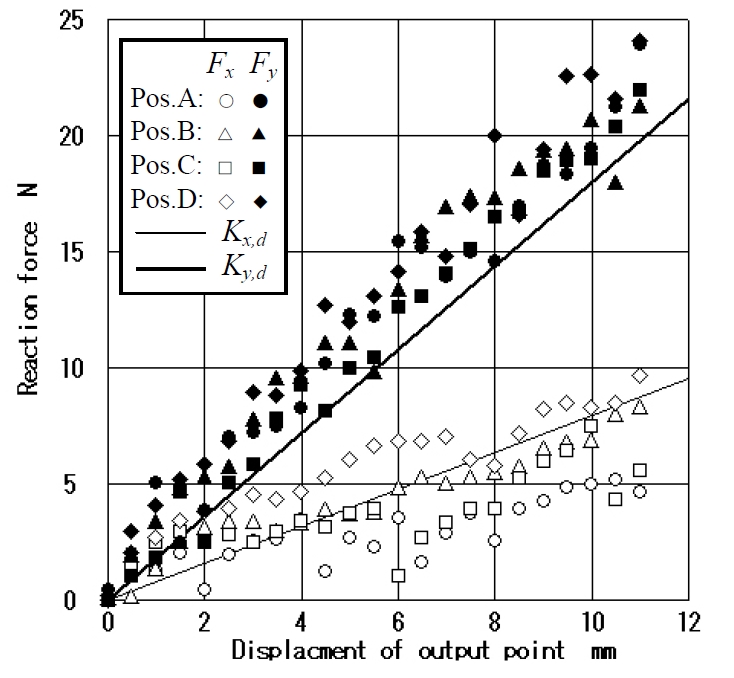
出力剛性の例
トップへ
ひとつ前へ戻る