|
|
|
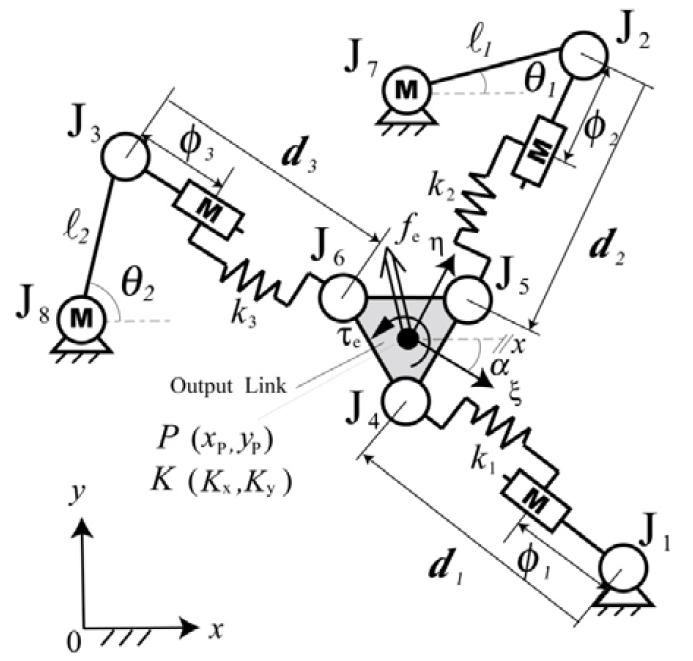
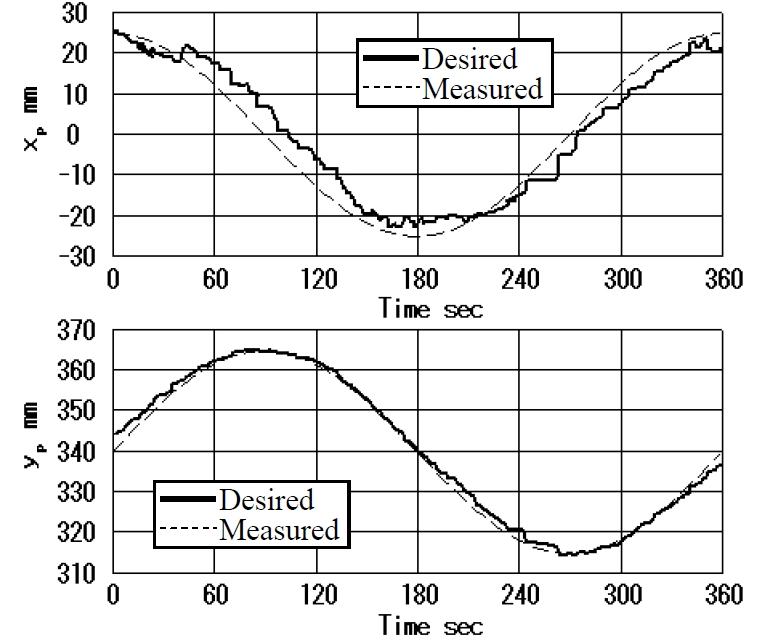
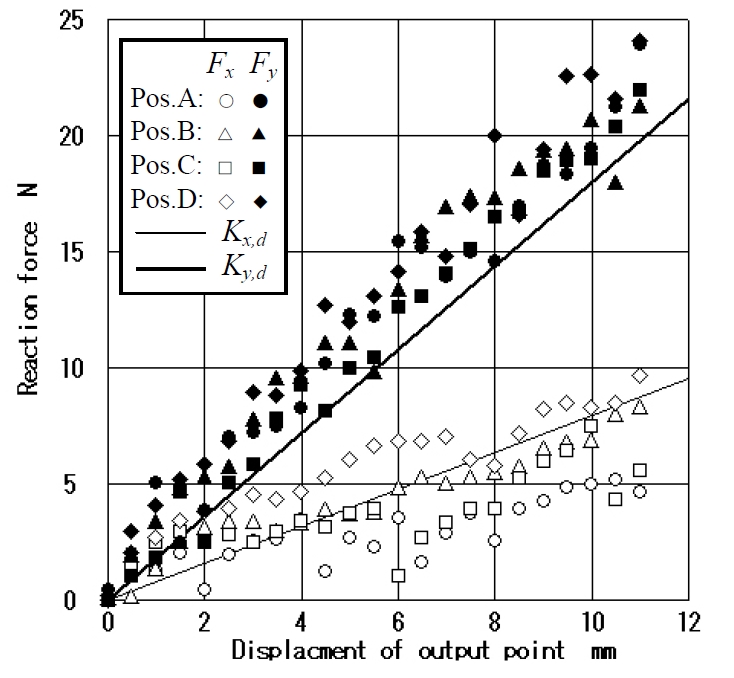
| Planar 5 actuator mechanism with elastic elements | Example of output displacement | Example of output stiffness |
|
(F5)Simultaneous Control of Out put Displacement and Stiffness with Parallel Mechanisms with Elastic Elements
|
Utilizing redundancy and flexibility of redundant parallel mechnisms with elastic elements, both of output displacement and ooutput stiffness are simultaneously controlled.
For an example, a planar parallel link mechanism with 3 linearmotors and 2 rotaty motors and 3 coil springs is theoretically controlled to generate
two-dimensional displacement and stiffness of its output link.
|