(PH7)閉ループ空間リンク機構のシステム解析
閉ループ空間リンク機構の系統的な運動学解析および動力学解析を可能にする解析ツールを構築します.これまでに,いくつかの2対偶素節の2連節の加速度までの運動解析を可能にし,空間4節リンク機構やスチュワートプラットフォームマニピュレータの運動解析を可能にしました.
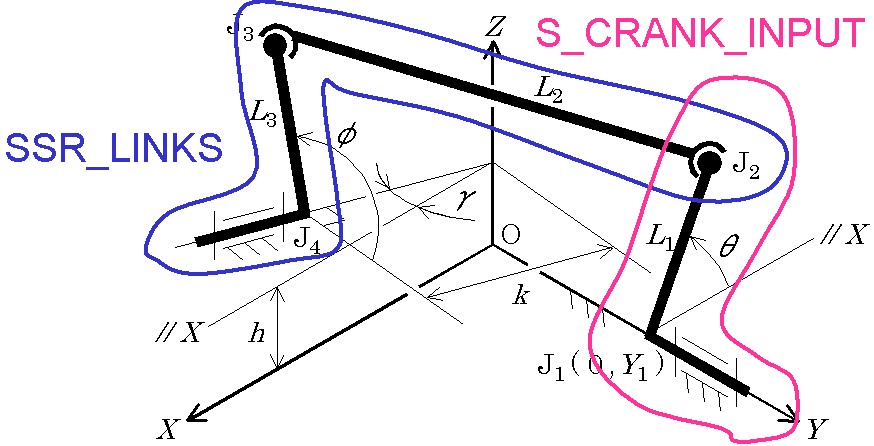
RSSR空間4節リンク機構
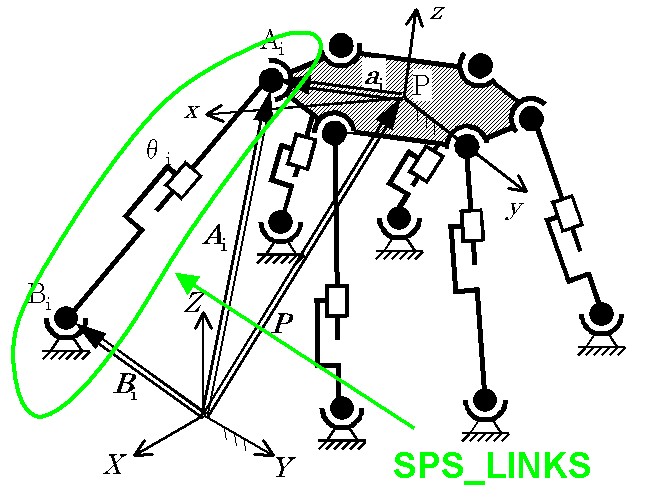
スチュワートプラットフォームマニピュレータ
トップへ
ひとつ前へ戻る