|
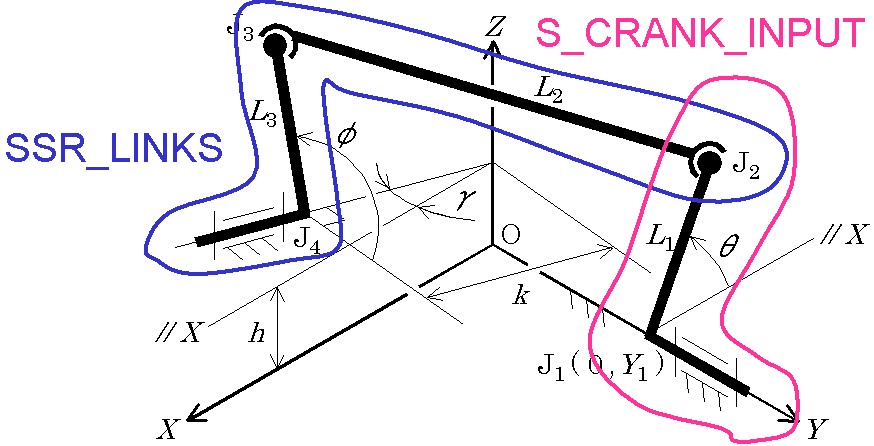
| RSSR spatial four-bar linkage |
|
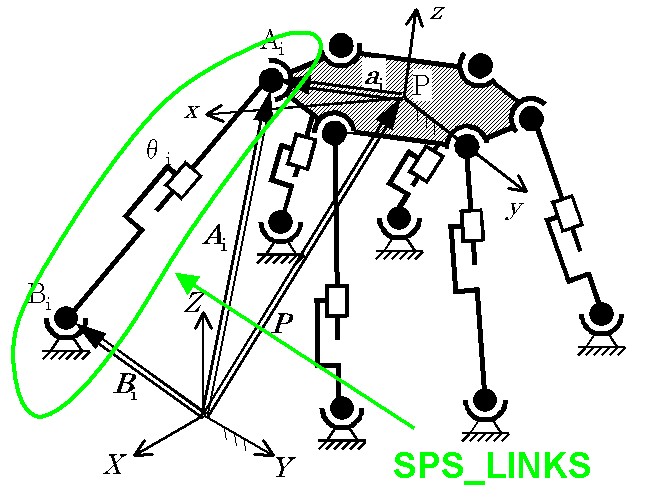
| Stewart platform manipulator |
|
(PH7)Systematically Kinematic Analysis of Spatial Closed-loop Link Mechanisms
|
Useful simulation tools which can systematically analyze kinematics and dynamics of spatial closed-loop link mechanisms will be developed. Several formulae to calculate displacement, velocity and acceleration of adjacent two binary links have been derived.
|