(F2)単一の薄肉弾性板からなる空間弾性パラレルメカニズム
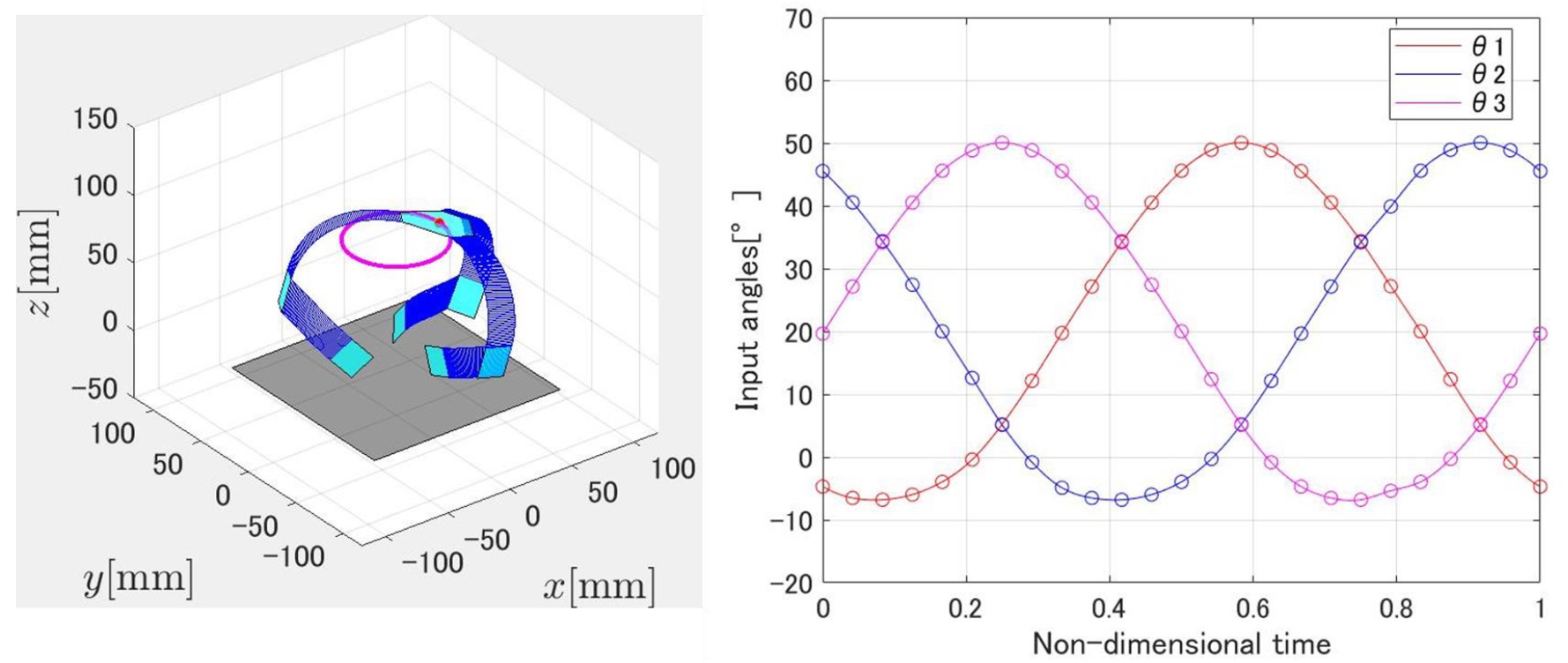
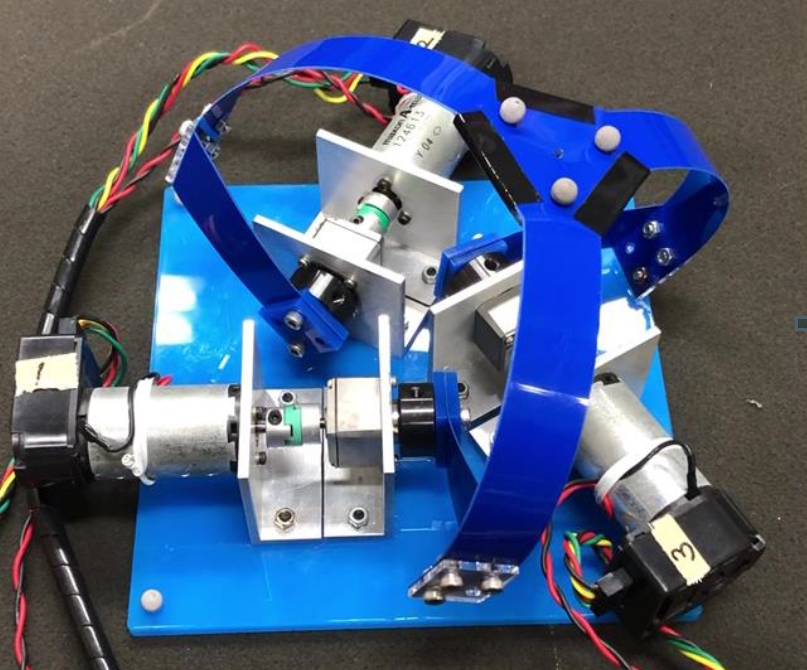
軽量・安価で柔軟性を有する多自由度ロボット機構を得るために,一枚の薄肉板を切り抜いて作成する空間弾性パラレルメカニズムを設計する. 薄肉板の3次元大変形解析に基づいて,機構の逆運動力学解析手法を確立した.例として3自由度空間弾性パラレルマニピュレータを設計・試作し,所望の運動を達成できることを明らかにした.
逆運動力学解析例
試作機
トップへ
ひとつ前へ戻る