|
|
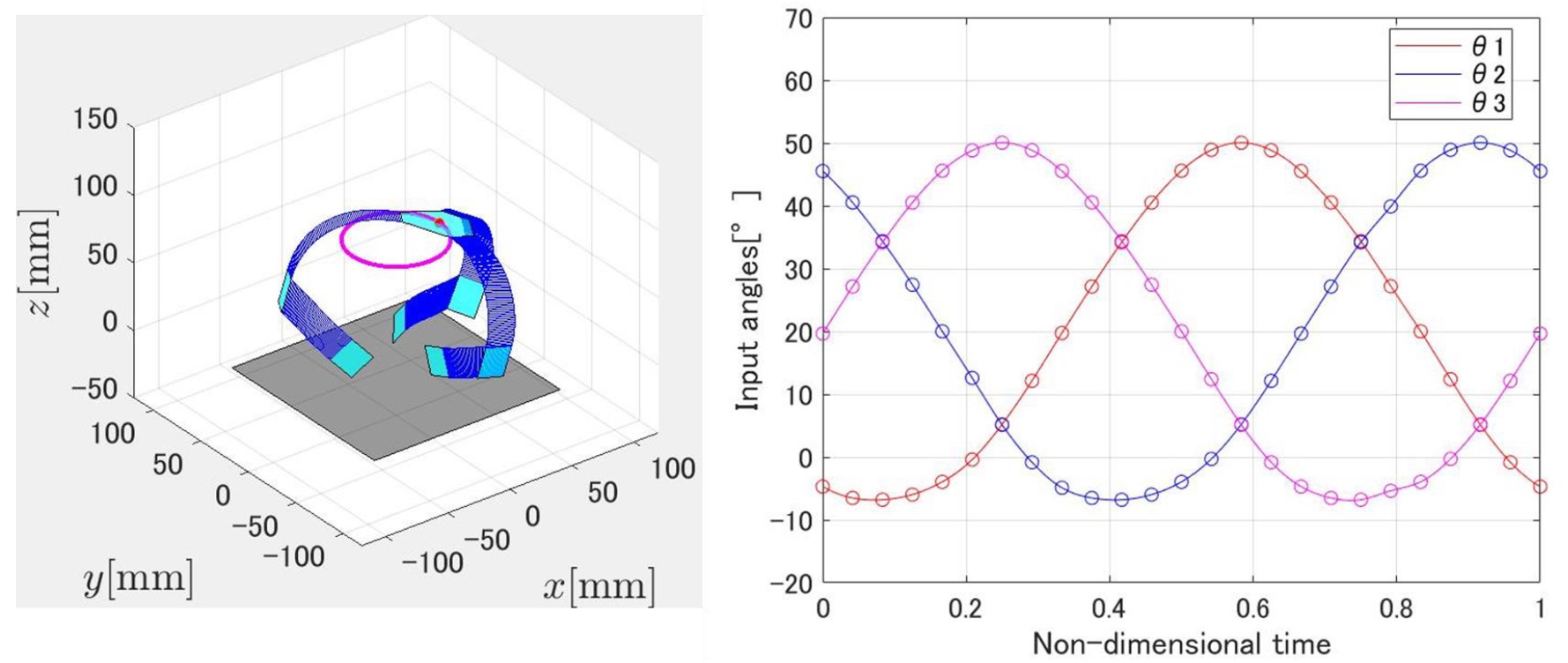
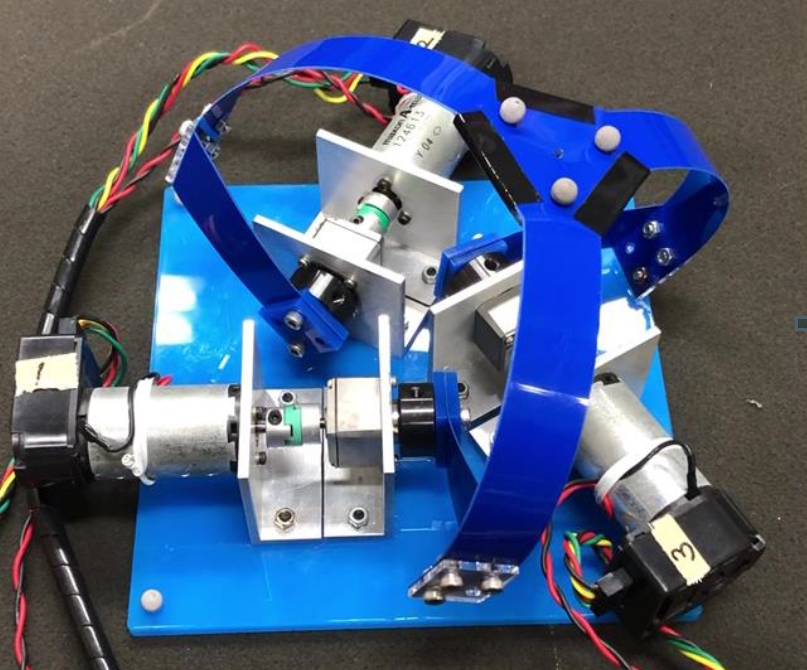
| An example of inverse kinetostatic analysis | A prototype |
|
(F2)Elastic Spatial Parallel Mechanism Made of a Certain Thin Plate
|
In order to develop light weight, cheap and flexible robot with multiple DOF, a novel elastic spatial parallel mechanism made of a certain thin plate is proposed and designed.
Based on large deformation analysis of a thin plane with an arbitrary shape, the inverse kinetostatics analysis method for the mechaoism is established.
For an example, an elastic spatial parallel mechanism with 3 DOF is designed and fabricated. The prototype can generate desired output motion.
|