メカトロ設計コンテスト2006
文責:
博士課程2年 松浦 大輔
matsuurd [at mark] mep.titech.ac.jp
博士課程2年 松浦 大輔
matsuurd [at mark] mep.titech.ac.jp
|
メカトロ設計コンテスト2006
文責:
博士課程2年 松浦 大輔 matsuurd [at mark] mep.titech.ac.jp |
| 更新履歴: [目次へ] | ||||||||||||||||||||||||
|
||||||||||||||||||||||||
| 実施要項 [目次へ] | |
| 日時 | 平成18年5月13日(土) 13:30〜18:30 |
| 場所 | 東京工業大学 大岡山キャンパス 石川台1号館 2階 253号室 〒152-8552 目黒区大岡山2-12-1 |
| 交通 | 東急目黒線・大井町線 大岡山駅下車 徒歩10分 (地図のPDFファイルはこちら)
車でご来校のチームは,入構申請手続きが必要ですので,
予定台数を 5月9日までに 御連絡下さい. 連絡先:森川 助手 (morikawk@mep.titech.ac.jp) |
| 参加チーム |
・ 山梨大学工学部機械システム工学科大内研究室 ・ 拓殖大学工学部機械システム工学科香川研究室 ・ 法政大学工学部システムデザイン学科田中研究室 ・ 山梨大学工学部機械システム工学科寺田研究室 ・ 東京工業大学工学部機械知能システム学科岩附・岡田研究室(幹事校) |
| 参加登録費 | 1研究室につき¥24,000(1チームの登録費込み)+¥12,000/追加登録チーム |
| 参加チームの詳細と成績 [目次へ] | |||||||||
|
東工大「ミニ四駆同好会」,東工大「クラテツ準備委員会」,山梨大「爆TORQUE」 法政大「(有)メカトロ屋・小金井支店」,拓殖大「走快C」,山梨大「阿世比丸リターンズ」 |
|||||||||
|
東京工業大学 岩附・岡田研究室
|
|||||||||
|
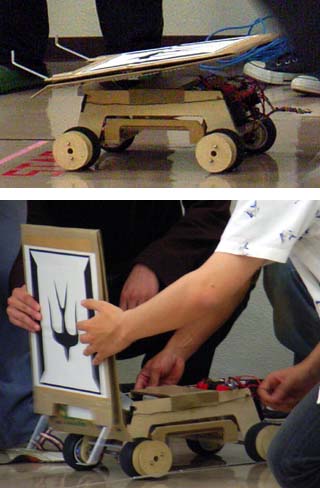
車体下部に必要に応じて引き出せる摺動板を持ち,参加チーム中で唯一 Stage5 の橋を渡った. Stage3の「スポンジの海」対策として,車体上部に切り離し式の架橋機構を備える. これらの工夫により,高速に各ステージをクリアした. 無線による遠隔操作を採用し,電源も車体に搭載することで,完全無線を実現. | ||||||||
| チーム名 : ミニ四駆同好会 | マシン名 : デカ四駆 |
スコア:1765 pts 優勝 |
Stage1 | Stage2 | Stage3 | Stage4 | Stage5 | Stage6 | Stage7 | Stage8 | 無線 |
| 0:09 | 0:23 | 0:10 | 0:07 | 0:48 | 0:20 | 0:09 | 0:09 | +100 | |
|
東京工業大学 岩附・岡田研究室
|
|||||||||

|
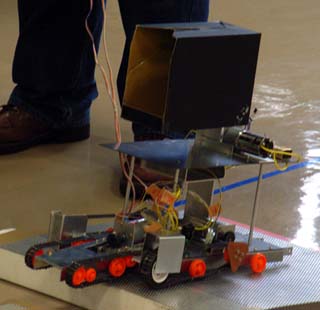
大径車輪を採用し,高速性を重視. 「スポンジの海」のクリアタイムは参加チーム中最速であった. 180度旋回するアームを備え,重心移動により高い登坂能力を有する. さらに,その先端の車輪と爪で車体を持ち上げるという大技で飛び石のクリアを狙った. 無線操縦方式を採用. | ||||||||
| チーム名 : クラテツ準備委員会 | マシン名 : ムーンライト青春18号 |
スコア:1418 pts 準優勝 |
Stage1 | Stage2 | Stage3 | Stage4 | Stage5 | Stage6 | Stage7 | Stage8 | 無線 |
| 0:09 | 0:25 | 0:05 | 0:16 | リタイヤ | 1:24 | 0:21 | 0:22 | +100 | |
|
山梨大学 大内研究室
|
|||||||||

|
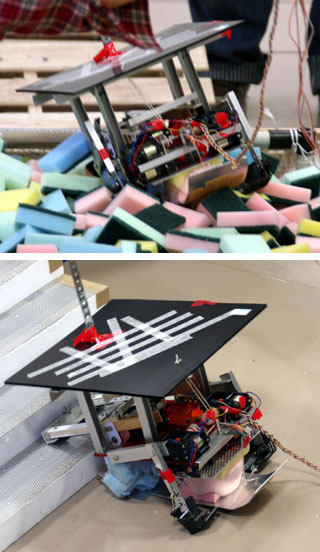
中央で折れる車体と180度旋回するアームによる重心移動を用いた,高い登坂能力・不整地走行能力を備える. 参加チーム中,全ステージをクリアしたのは本チームと1位の東工大チームのみである. | ||||||||
| チーム名 : 爆TORQUE | マシン名 : ULTRA DASH |
スコア:1288 pts 3位 |
Stage1 | Stage2 | Stage3 | Stage4 | Stage5 | Stage6 | Stage7 | Stage8 | 無線 |
| 0:35 | 2:29 | 0:30 | 0:40 | 0:42 | 1:55 | 1:18 | 0:23 | None | |
|
法政大学 田中研究室
|
|||||||||
|
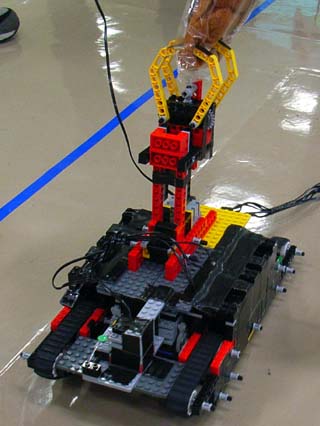
本チーム内の限定ルールにより,「Lego Mind Storms」を用いて製作された機体. 大会当日に書き込まれたプログラムが消失するというトラブルが生じ,本番はメンバーらの連係操作により動作した. これを称えて,本チームには「ヒューマトロニクス賞」が贈られた. | ||||||||
| チーム名 : (有)メカトロ屋・小金井支店 | マシン名 : 佐助LMS |
スコア:981 pts ヒューマトロニクス賞 |
Stage1 | Stage2 | Stage3 | Stage4 | Stage5 | Stage6 | Stage7 | Stage8 | 無線 |
| 0:56 | リタイヤ | 2:19 | 0:18 | 0:38 | 3:13 | 0:32 | 0:43 | None | |
|
拓殖大学 香川研究室
|
|||||||||
|
Stage7 のパンをとるためのアームに,無線操縦を採用. 走行中に車軸の止めねじが外れるなどのトラブルにもめげず,果敢にクリアを目指したことを称え,本チームには「敢闘賞」が贈られた. | ||||||||
| チーム名 : ざ・ここあ | マシン名 : 走快C |
スコア:104 pts 敢闘賞 |
Stage1 | Stage2 | Stage3 | Stage4 | Stage5 | Stage6 | Stage7 | Stage8 | 無線 |
| 1:38 | リタイヤ | リタイヤ | リタイヤ | リタイヤ | リタイヤ | 0:28 | 2:50 | +100 | |
|
山梨大学 寺田研究室
|
|||||||||
|
本チーム内の限定ルールにより,「車輪・無限軌道の使用禁止」という非常に厳しい制約の下に製作された機体. 移動には脚機構を採用.左右の脚に加え,後部にも突っ張り用の「第3の脚」を備え,Stage4 の階段のクリアに成功した. 後半でのパンの獲得やスラロームのクリアにも成功するなど多くのステージのクリアに成功したことからも,機体の完成度は高かったと言える. これらを称えて,本チームには「アイディア賞」が贈られた. | ||||||||
| チーム名 : 阿世比丸リターンズ | マシン名 : 長谷比丸 |
スコア:90 pts アイディア賞 |
Stage1 | Stage2 | Stage3 | Stage4 | Stage5 | Stage6 | Stage7 | Stage8 | 無線 |
| 2:52 | リタイヤ | リタイヤ | 2:20 | リタイヤ | リタイヤ | 1:27 | 1:51 | None | |
| 「Sasuke ザ・ロボット」 競技説明 [目次へ] | |||||||||||||||||||||||||
|
競技規則 【印刷用】 (PDF形式) |
|
||||||||||||||||||||||||
|
|||||||||||||||||||||||||
|
点数計算方法 |
|
||||||||||||||||||||||||
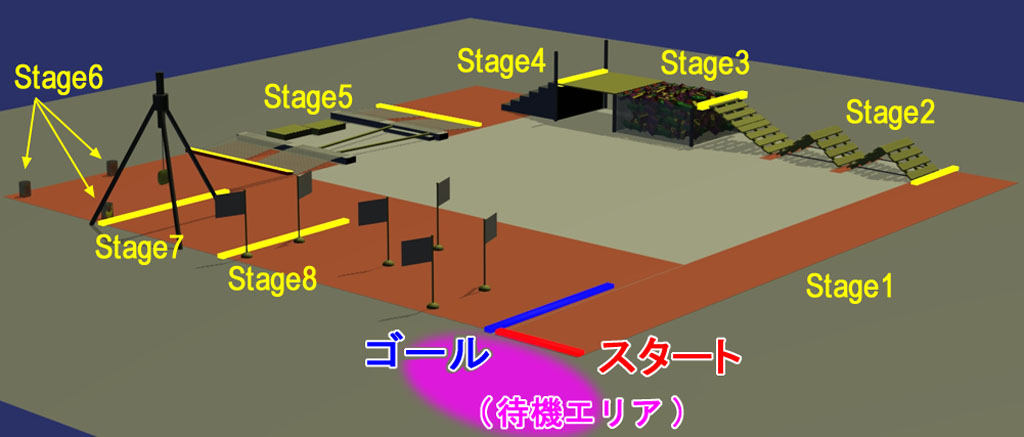
| フィールドの配置 [目次へ] | |||
 [フィールドの写真や詳細情報] 全体 Stage1 Stage2 Stage3 Stage4 Stage5 Stage6 Stage7 Stage8
|
|||
| 各ステージの説明 [目次へ] | |||||||||||||||||
|
|||||||||||||||||
| 質問と回答 [目次へ] | ||||||||||||||
|
||||||||||||||
 すのこ 2枚
すのこ 2枚 カゴ・スポンジ・風船 4つ
カゴ・スポンジ・風船 4つ 緩衝材がたくさん入っていますので,開封時にはご注意下さい.
緩衝材がたくさん入っていますので,開封時にはご注意下さい.
 スタート直後の直線ステージ.
スタート直後の直線ステージ.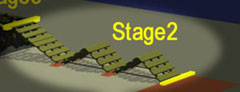 「すのこ」を組み合わせて製作された山が2つ連なるステージ(
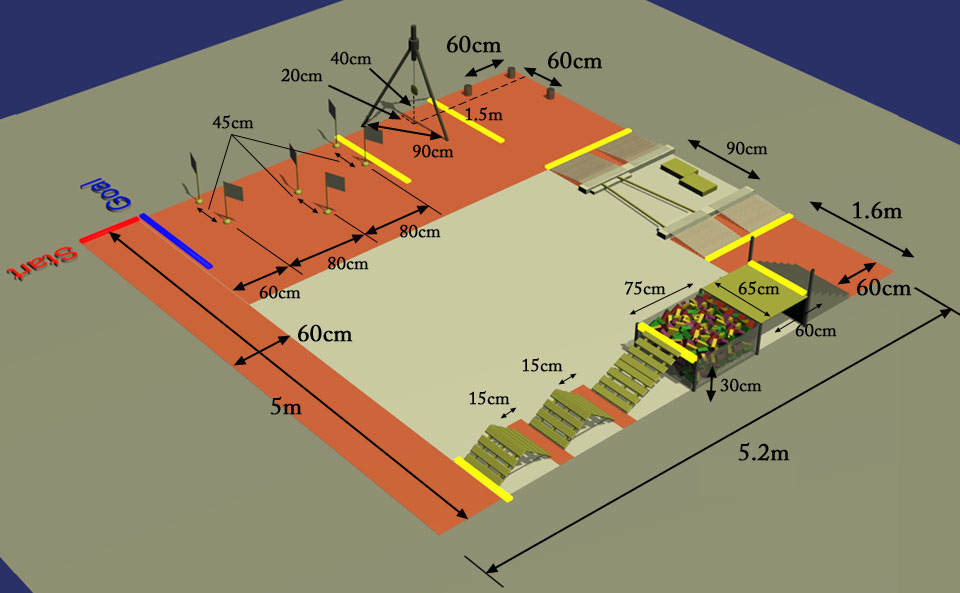
「すのこ」を組み合わせて製作された山が2つ連なるステージ(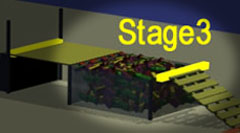 図のように,箱の中に台所用スポンジが入ったプールがあり,この中を抜ける.
プールの大きさは幅60cm×長さ70cm×深さ30cm.
図のように,箱の中に台所用スポンジが入ったプールがあり,この中を抜ける.
プールの大きさは幅60cm×長さ70cm×深さ30cm.
 6段の階段を下りる.踏面は60cm×10cm,段差5cm.
6段の階段を下りる.踏面は60cm×10cm,段差5cm.
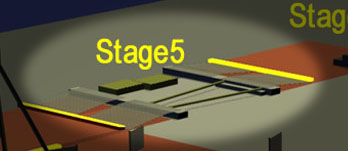 飛び石あるいは八の字に渡された橋を渡って反対側へ渡る.
どちらのコースを通るかは競技者が選ぶ.
飛び石あるいは八の字に渡された橋を渡って反対側へ渡る.
どちらのコースを通るかは競技者が選ぶ.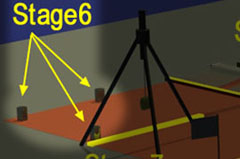 上が塞がった3つのカゴの中に風船が入っており,メカトロシステムでこれを割る.
風船の入った筒は,直径8cm,高さ10cm.穴の大きさは直径5mm.
上が塞がった3つのカゴの中に風船が入っており,メカトロシステムでこれを割る.
風船の入った筒は,直径8cm,高さ10cm.穴の大きさは直径5mm.
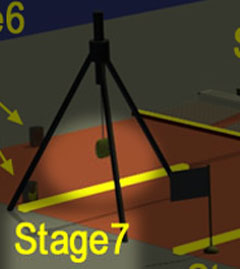 ミシン糸と洗濯ばさみによって吊り下げられた袋入りのパンをとる.
とったパンは,ゴールまで運ばなければならない.
ミシン糸と洗濯ばさみによって吊り下げられた袋入りのパンをとる.
とったパンは,ゴールまで運ばなければならない.
 ステージ7で獲得したパンを持って,45cmの幅で立てられた2つの旗の間をスラロームしてゴールを目指す.
ステージ7で獲得したパンを持って,45cmの幅で立てられた2つの旗の間をスラロームしてゴールを目指す.